操作步骤
步骤1 :选择“设置 > 外设管理 > 外设管理 > 串口设置”。
系统显示“串口设置”界面
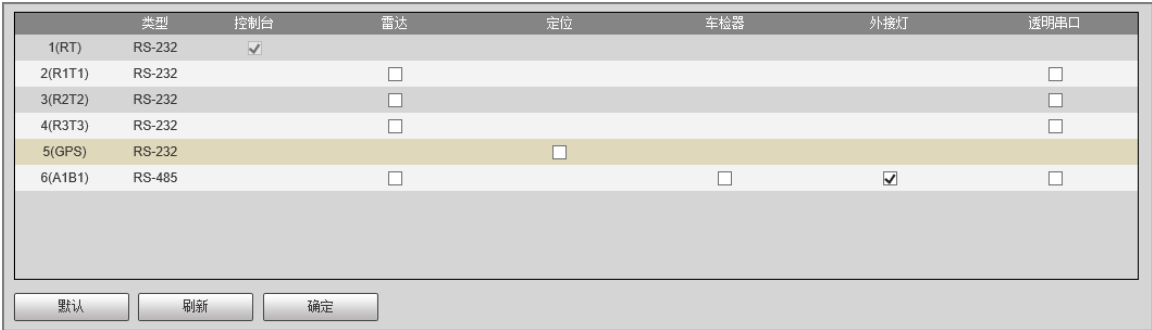
步骤2: 配置外接设备。
注:
● 同一串口,仅支持使能一种外接设备。
● 设备支持RS-485和RS-232类型串口。
◇ RS-232类型串口支持使能单车道雷达,RS-485类型串口支持使能多车道雷达。
(多目标雷达不能进行超速处罚,仅有一个RS-485口,爆闪灯和多目标雷达不能
同时使用。)
◇ 单车道雷达与多车道雷达不能同时开启
● 雷达和车检器不支持同时开启。
配置雷达
1. 选择“雷达”,使能雷达设备。
2. 配置雷达参数。
单车道雷达(高级配置)界面如下图:
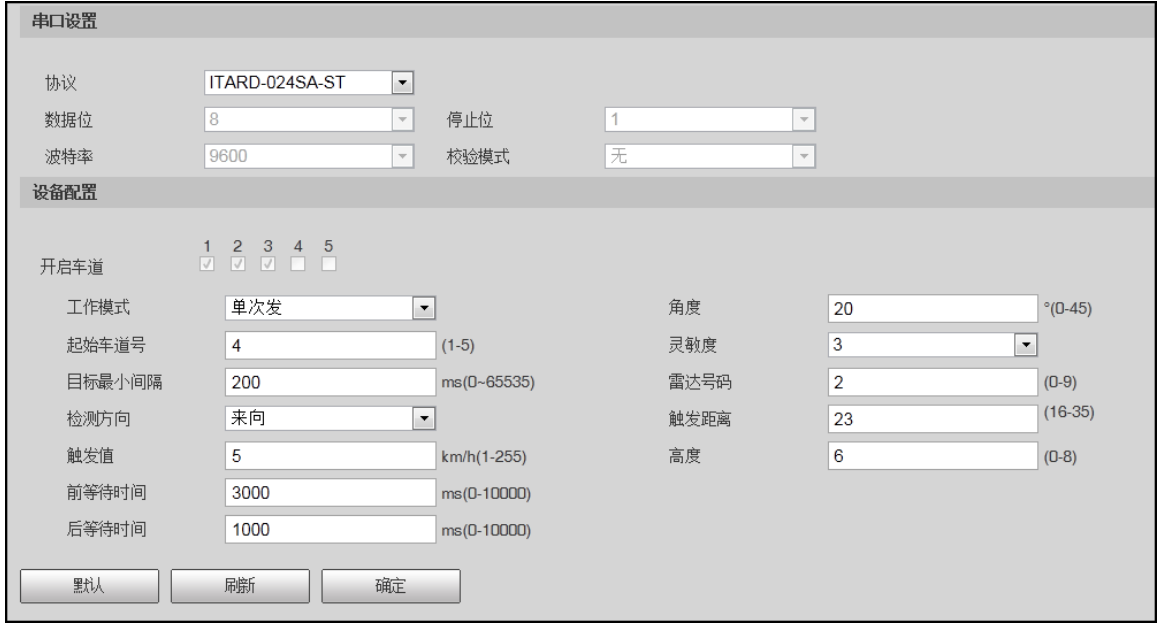
多车道雷达(高级配置)界面如下图:

雷达参数(高级配置)说明
串口设置
协议: 仅支持ITARD-024MA-H。
数据位 :不可设置,系统默认为“8”。
停止位: 不可设置,系统默认为“1”。
波特率 :不可设置,系统默认为“9600”。
校验模式 :不可设置,系统默认为“无”。
设备配置
起始车道号: 设置雷达起始监测的物理车道编号。
目标最小间隔: 最小间隔时间内雷达认定为只有一个物体。
注:此功能需特殊程序支持。
检测方向: 雷达检测的方向。
角度: 雷达波束方向与车辆行驶方向的夹角。
灵敏度 :可调节雷达抓拍的灵敏度等级。其中“0”最不灵敏,“5”最灵敏。
触发值: 对应雷达最低抓拍速度,车辆速度达到触发值时,触发抓拍。
道路个数: 设置雷达设备检测车道的数量。
前等待时间: 图片抓拍时机点前后等待时间内获取到雷
达速度就用:雷达速度,前后等待时间没有
后等待时间 :获取到雷达速度就取高低限速的随机值。
3. 单击“确定”。
配置定位
1. 选择“定位”,使能定位设备。
2. 配置定位参数(可选择GPS或北斗)。
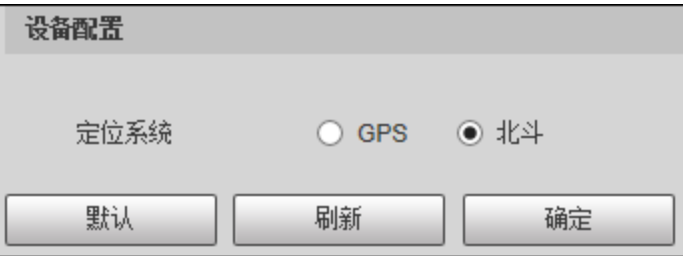
3. 单击“确定”。