

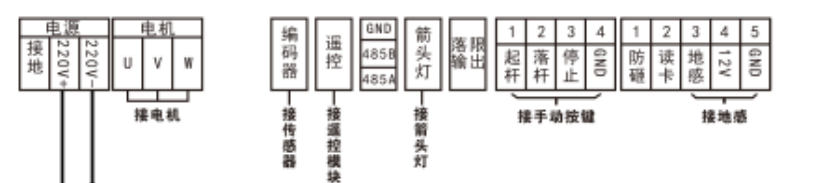
控制板接线
注:
1、控制板内部接线出厂时已连接完成,无特殊情况禁止改变内部接线。如有需求,用户只需接入外部信号线,如摄像机、地感/雷达等信号。
2、由于道闸输出电流不够,雷达需配合适配器使用供电,不能从道闸上电。
调试弹簧平衡
注:
1、整机装配完成后,检查各零件配合是否紧密、端正牢固,线路是否正确有序,确认无误后通电试运行,一切正常无误后,方可投入使用。
2、闸杆不在水平/闸杆不在垂直时:调节机芯连杆的长短或重新学习限位。
3、道闸出厂时,已根据该道闸的挡杆长度和挡杆重量将弹簧调整到平衡状态,无特殊情况不得改变挡杆长度和重量。
4、 弹簧配置根数与杆长相关,杆长如有发生变动必须调整对应弹簧配比和主板参数,弹簧配置表如下。
弹簧配置表

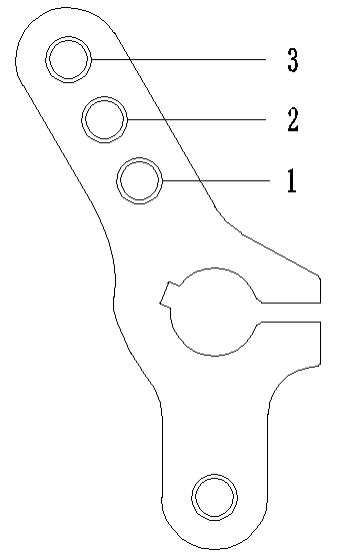
拐臂挂孔
闸杆不在水平/闸杆不在垂直
调节机芯连杆的长短
重新学习限位
闸杆起杆抖动
起杆频率过大,调小 F0.00 参数
调整起杆缓冲频率 F0.25 的参数
弹簧力度过大,用扳手拧松调节杆,使弹簧力减小
调整主轴拐臂挂孔位置,挂 3 孔时弹簧力度最大,挂 1 孔时弹簧力度最小
闸杆落杆抖动
落杆频率过大,调小 F0.01 参数
调整落杆缓冲频率 F0.27 的参数
弹簧力度过小,用扳手拧紧调节杆,使弹簧力加大
调整主轴拐臂挂孔位置,挂 3 孔时弹簧力度最大,挂 1 孔时弹簧力度最小
控制器功能参数设置
功能参数
F0.00 设置起杆频率
F0.01 设置落杆频率
F0.10 恢复出厂设置及学习限位
F0.13 设置起杆第一缓冲角度
F0.14 设置落杆第一缓冲角度
F0.16 设置落杆时地感不起作用的角度
F0.17 自动落杆延时(触发地感/雷达后)
F0.18 自动落杆延时(无触发地感/雷达)
F0.25 设置起杆第二缓冲起始频率
F0.26 设置起杆第二缓冲起始角度
F0.27 设置落杆第二缓冲起始频率
F0.28 设置落杆第二缓冲起始角度
F0.33 参数解锁设置
F0.34 道闸参数的选择
参数调试
注:
1、设备在出厂时已调试完成,现场直接安装闸杆即可,建议不要随意修改出厂参数。
2、每次参数调试时都需要先解锁参数之后才能执行其他操作,解锁参数 10 分钟内有效,可执行其他调试动作,超过 10 分钟需再次解锁。
解锁参数
按【功能】键,再按  直到数码管显示 F0。
直到数码管显示 F0。
按【确定】键进入菜单,数码管显示“F0.XX”,其中“XX”为阿拉伯数字,此时按 直到数码管显示“F0.33”。
按【确定】键进入,此时数码管显示“0000”,按  控制光标位置。
控制光标位置。
光标闪烁时按 将数值修改为“0008”。
将数值修改为“0008”。
再按【确定】键,即可修改需要的参数。
道闸参数选择
当数码管显示“F0.34”时,按【确定】键进入。
按 将参数值改为“1”,再按【确定】键。
更改此参数需恢复出厂设置后才能生效。
设置起杆频率
当数码管显示“F0.00”时,按【确定】键进入。
再按【向右】键控制光标的位置,光标闪烁即可按 / 更改相对应的参数,修改完成
后按【确定】键保存(参数值以起杆稳定为宜)。
设置落杆频率
当数码管显示“F0.01”时,按【确定】键进入。
再按 控制光标的位置,光标闪烁既可按 更改相对应的参数,修改完成后按【确定】键保存(参数值以落杆稳定为宜)。
学习限位
当数码管显示“F0.10”时,按【确定】键进入。
使用 将参数值改为“2”,再按【确定】键进入。
数码管显示类似“OPEN”时,按住【起杆】键不放,直到闸杆到垂直位置时松开,按【确定】键保存。
此时数码管显示类似“CL”,按住【落杆】键不放直到闸杆到水平位置时松开,按【确定】键保存。
调整起杆第一缓冲起始角度
当数码管显示“F0.13”时,按【确定】键进入。
使用  改变光标的位置,光标闪烁时按修改相应位置的参数值(杆子距离垂直方向范围角度:30 度~90 度)。
改变光标的位置,光标闪烁时按修改相应位置的参数值(杆子距离垂直方向范围角度:30 度~90 度)。
按【确定】键保存。
注:建议参数值随起杆频率变化而变化,以起杆稳定为宜。
调整落杆第一缓冲起始角度
当数码管显示“F0.14”时,按【确定】键进入。
使用 改变光标的位置,光标闪烁时按 修改相应位置的参数值(杆子距离水平面范围角度:30 度~90 度)。
修改完成按【确定】键保存。
注:建议参数值随落杆频率变化而变化,以落杆稳定为宜。
调整起杆第二缓冲起始频率
当数码管显示“F0.25”时,按【确定】键进入。
使用 改变光标的位置,光标闪烁时按修改相应位置的参数值。
修改完成按【确定】键保存。
注:此参数影响闸杆即将到位的稳定性,以起杆稳定为宜。
调整落杆第二缓冲起始频率
当数码管显示“F0.27”时,按【确定】键进入。
使用 改变光标的位置,光标闪烁时按 修改相应位置的参数值。
修改完成按【确定】键保存。
注:此参数影响闸杆即将到位的稳定性,以落杆稳定为宜。
恢复出厂设置
当数码管显示“F0.10”时,按【确定】键进入,按 将数值改为“1”,再按【确定】键既可。
学习遥控器
按下控制器的【学习】键再按下遥控器的任意按钮,完成学习。
计数模式
当多次输入开闸信号后,系统将自动计算通过地感的车辆数量,当通过地感的车辆数量等于输入的开闸信号次数时,道闸自动关闭。
进入计数模式需要将控制盒的“起杆”、“GND”接口和“读卡”、“GND”接口并联在一起。
自动落杆延时(触发地感/雷达后)
过车触发地感/雷达信号之后延时自动关闸,例如此参数设置为 2,车经过地感/雷达之后,待地感/雷达信号消失之后再延时 2 秒自动落杆。
此参数默认关闭,即地感/雷达信号消失之后道闸立马落杆。
当数码管显示 F0.17 时按【确定】键进入,进行参数设置,单位:秒。
自动落杆延时(无触发地感/雷达)
无车延时落杆,道闸开到位后,没有地感/雷达信号触发,经过一个设定的时间,道闸自动落杆。
此参数默认关闭,即道闸开到位后不会自动落杆。
将 F0.06 的十位数设置成 1 后按【确定】键,表示解锁此功能,随后设置 F0.18 参数值,单位:秒,按【确定】键保存。
遥控一键车队模式
车队模式即为道闸常开模式,车队模式下地感/雷达信号无效,不会导致道闸关闸,可通过遥控器退出车队模式。
1、进入车队模式:长按遥控器【STOP】键 10 秒以上进入车队模式。主板控制盒数码管显示字符发生变化,即代表进入了车队模式。
2、退出车队模式:在车队模式下短按一下遥控器【STOP】键即可退出车队模式。
遥控器设置
1、对码
按下控制器的学习键再按下遥控器的任意按钮,完成学习。
2、清码
下控制器【功能】键,再按 直到数码管显示 F1。
按【确定】键进入菜单,按按 直到数码管显示“F1.00”。
按【确定】键进入,再按 ,把数值“0”改为“1”
注:执行上述步骤后,将会清除所有已注册的遥控编码