

线缆颜色、标识及接线说明如下
红色(VCC)——-12V电源正极
黑色(GND)——-12V电源负极
白色(A+)———485通信A端
紫色(B-)———-485通信B端
蓝色(A1公共)———-继电器常开输出端 端 ,连接道闸主板地感端子
橙色(A2地感)———-继电器常开输出端 ,连接道闸主板GND或公共端子
绿色(B1)———-继电器常闭输出端
黄色(B2)———-继电器常闭输出端
月度归档: 2022 年 10 月
百胜智能PGM03J、PGM03JYD、PGM03B广告门接线图
控制器接线如下图:

限位学习流程,如下图:
注:初次安装、更换控制板或恢复出厂设置,通电前请将门开至 40°~50°位置,再学习限位

功能参数定义

时间参数定义

功能和时间参数设置流程

注:常开模式
长按遥控器“*”键 10 秒以上,门体自动打开,进入常开模式。
常开模式下,按遥控器停止键退出该模式
故障代码表
E0 ———电压异常 ,检查供电
E1 ——— 过流 ,检查是否有异物阻挡门体
E2 ———运行超时, 检查机构运行是否顺畅
E3 ———电机堵转 ,检查电机运行是否顺畅
E5 ———电机传感器异常, 检查电机传感器通路
E7 ———红外信号超时, 移开挡住红外的物体
百胜智能VL38、VL40、VL61、VL62智能一体机接线方法及安装调试说明
本内容适用型号控制器板号为DZ-BLDC36V-3.0的机型 ,如VL38、VL40、VL61、VL62、
VL40智能一体机控制器接线如下图:

VL40智能一体机限位设置,如下图:

VL40智能一体机切换左右机操作流程
1、重新开机到默认显示界面
2、短按“设置”显示6666
3、短按“开”键加到6668
4、短按“设置”键显示F-00
5、短按“开”键,直到显示F-06
6、短按“设置”键,显示0,短按“开”键,加到1
7、短按“设置”键,切换左右机
VL40智能一体机控制器功能参数设置流程

参数F功能表

参数C功能表

杆型选择操作流程
1、重新开机到默认显示界面
2、短按“设置”显示6666
3、短按“开”键加到6668
4、短按“设置”键显示F-00
5、短按“设置”键,显示当前“杆型-杆长”
6、参照杆型表,根据实际杆型杆长进行选择
7、短按“设置”键,完成杆型选择
注:杆型代码如下:
0 ——-大八角直杆
1 ——-单层栅栏杆
2 ——-大泡沫圆杆
3 ——- 单面带胶条杆
4 ——-曲臂杆
恢复出厂设置流程
1、重新开机到默认显示界面
2、短按“设置”显示6666
3、短按“开”键加到6668
4、短按“设置”键显示F-00
5、短按“开”键,直到显示F-10
6、短按“设置”键,显示0,短按“开”键,加到10
7、短按“设置”键,恢复出厂设置
故障代码表及解决方法

常见故障排查
按开闸却在关闸
电机运行方向设置错误,调到P5设置电机运行方向
闸杆升/落不能到达水平或竖直位置
可能原因:
连杆长度调节不当
限位位置设置不当
排除方法:
1、打开机箱门,机箱盖,检查主动连杆与中间连杆重合时,闸杆是否处于水平位置,主动连杆与中间连杆成一直线时,闸杆是否处于水竖直位置。如不能实现以上状态即可通过调节调节螺套,使两连杆重合时,闸杆处于水平位置,两连杆成一条直线时,闸杆处于竖直位置(如下图)。

2、通过控制器重设限位位置。
闸杆到达竖直位置或水平位置时抖动较大
可能原因:
限位位置设置不当、连杆位置不协调
主轴与闸杆夹头平键松动
排除方法:
1、参照上方步骤
2、更换平键,使主轴与闸杆夹头无松动
遥控器对码和清码
对码操作
按主板上遥控学习键一次,主板遥控学习指示灯将会点亮,然后 持续按住遥控器上的任意键,直到指示灯闪烁熄灭,表示对码完成。重复此操作,可学习多个遥控器代码。
清码操作
按住主板上遥控学习键不放,主板遥控学习指示灯将会点亮,持续约10秒钟后,指示灯将会自动闪烁熄灭,表示清码操作完成。
百胜智能YZ08翼闸接线图及安装说明
YZ08翼闸控制板电路如下图

YZ08翼闸主机接线说明如下图

YZ08翼闸从机接线说明如下图

YZ08翼闸接线端子详细说明

主板功能参数定义及设置流程
1、按键说明,如下图:

S1设置键,按此键进入设置界面;
S2开1/加键↑,进闸开门或按此键进入下一个功能;
S3开2/减键↓,出闸开门或按此键进入上一个功能;
S4紧急/退出键,紧急开闸、退出设置。
2、功能参数定义
正常状态下主板上数码管显示编码器的值
系统功能参数定义如下:
P1——————– 中间限位设置
P2——————– 自检速度设置
P3——————– 编码器模式设置
P4——————–开闸速度调节
P5——————– 关闸速度调节
P6 ——————–电机转动方向设置
P7
闸机通行模式设置,闸机共有九种通行模式;
0:入向自由,出向自由
1:入向自由,出向受限
2:入向自由,出向禁止
3:入向受限,出向自由
4:入向受限,出向受限
5:入向受限,出向禁止
6:入向禁止,出向自由
7:入向禁止,出向受限
8:入向禁止,出向禁止
注:“受限”指的是需要依靠刷卡、人脸识别或者指纹识别等方式才能开闸.
P8——————– 主从机设置:0为主机 1为从机
P9 ——————–延时关闸时间设置:默认3秒
F1 ——————–闸机减速距离设置
F2——————– 遇阻灵敏度设置
F7——————– 单双机设置: 0为双机 1为单机
3、设置流程图
以设置P7参数为例

常见故障排查
1、上电无反应,数码管不亮
无电源输, 检查外部供电
2、保险丝熔断
电流过大,更换熔断的保险管
3、电机不转
电机线断路, 检查线路
4、入口刷卡,摆门往入口摆动或出口刷卡,摆门往出口摆动
左开右开开门信号接反,开门信号出现接线
5、主从机开关门同步但摆动的方向不一致
主从机设置错误,重设 P8 的值
6、上电后关门时闸门不在中心点
零位偏移值没有设置好 设置 P3 的值,并按设置键保存
7、显示 Err1
编码器没检测到,检查编码器的线路
8、显示 Err2
电机故障,检查电机线是否脱落或者电机损坏
9、显示 Err3
通讯异常,检查 485 接线是否有松动,检查主从机设置是否正确
10、显示 Err4
开门遇阻,检查是否有障碍物阻挡,若无则调大 F2 遇阻值
11、显示 Err5
关门遇阻,检查是否有障碍物阻挡,若无则调大 F2 遇阻值
12、显示 Err6
电压异常,检查是否断电或者开关电源故障
华硕服务器主板更新BIOS的操作方法
更新BIOS前,准备一个U盘,并格式为FAT32位,在到华硕官网下载新版本的BIOS固件程序,以华硕P12R-M-10G-2T主板为例,下载完成后得到一个文件名为P12R-M-10G-2T-ASUS-0802.zip的压缩包,如下图:

解压缩后得到两个文件,如下图:
BUPDATER.EXE为DOS环境下更新BIOS的主程序
P12R-M-10G-2T-ASUS-0802.CAP为服务器主板BIOS固件程序包
华硕官方提供有三种更新BIOS的方法
一、ASUS CrashFree BIOS 3
当BIOS程序损坏,无法开机时,可以使用华硕的专用工具ASUS CrashFree BIOS 3修复
1、将BIOS固件程序名P12R-M-10G-2T-ASUS-0802.CAP变更为:P12RM.CAP,并复制到U盘根目录下
注:更改的文件名以主板型号命名,并非所有主板都需要变更名称 。
2、将U盘插入主板USB端口
3、启动服务器,系统会自动检查U盘中的BIOS固件程序,并开始更新。
二、ASUS EzFlash
在BIOS操作界面更新固件程序
1、将BIOS固件程序P12R-M-10G-2T-ASUS-0802.CAP复制到U盘根目录下
2、开机进入BIOS界面,进入Tool菜单,选择Start EzFlash,按回车键,将其开启,如下图
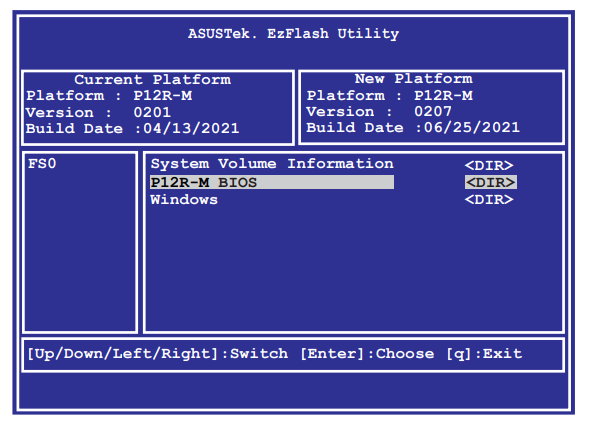
3、按Tab键切换至Drive字段
4、按上下方向键移动至存储有BIOS固件程序的U盘目录,再按回车键
5、按Tab键切换至Folder Info字段
6、按上下方向键选择BIOS文件,再按回车键执行BIOS更新程序
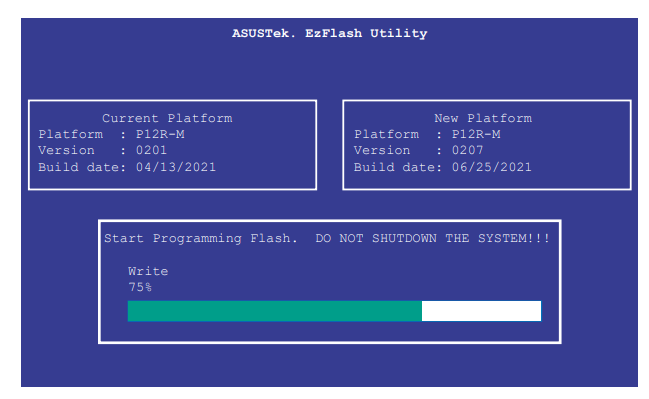
7、待更新完成后,重新启动服务器
注:更新完成后,重新进入BIOS操作界面,按F5键恢复成默认的BIOS设置参数
三、BUPDATER
1、使用工具盘引导服务器系统到DOS环境下
2、输入 BUPDATTER /i P12R-M-10G-2T-ASUS-0802.CAP
注:P12R-M-10G-2T-ASUS-0802.CAP 为固件程序文件名
3、程序运行后会进行检查文件操作,然后开始更新BIOS文件
4、完成更新后,程序会回到DOS画面,请重新启动系统即可
道闸异常,一直不停起落杆,遥控器也无法控制的故障排查
出现这种情况,可能触发了防砸信号,请排查防砸雷达的检测参数
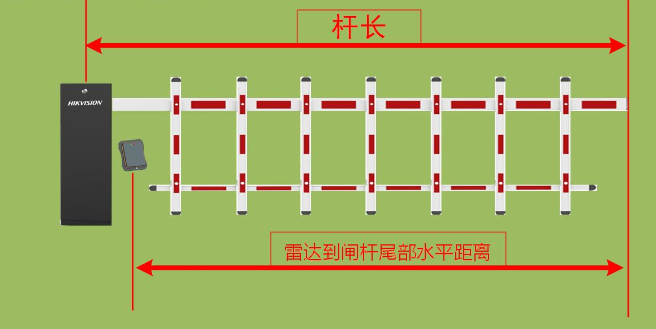
最大检测距离:雷达检测最远长度
防砸雷达:雷达到闸杆尾部水平距离减去0.2米
触发雷达:车道宽度减去0.2米
如下图:
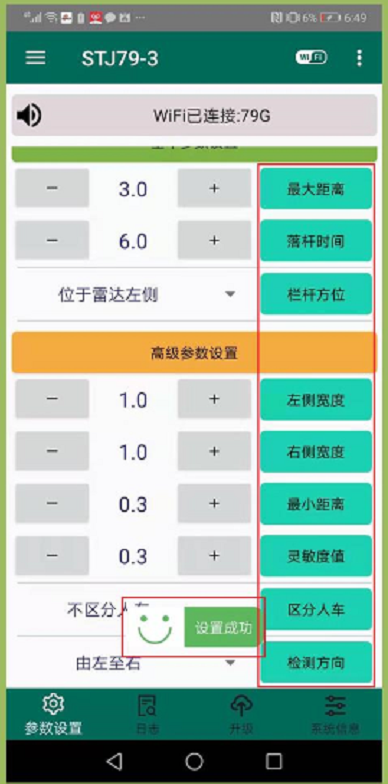
落杆时间:根据道闸实际落杆时间设置
栏杆方法:
触发雷达,选 触发模式
直杆、曲臂杆道闸防砸,选单杆防砸
栅栏杆、广告杆道闸,面对雷达判断闸杆选位于雷达右侧
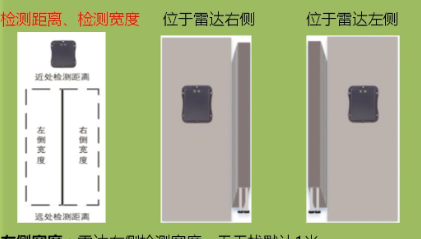
左侧宽度:雷达左侧检测宽度,无干扰默认1米
右侧宽度:雷达右侧检测宽度,无干扰默认1米
单杆模式,建立检测总宽度(左侧+右侧宽度)不小于1米
广告杆在雷达左侧/右侧,建立左右侧宽度均大于0.5米
最小距离:雷达近处过滤距离,无干扰默认0.3米(有的默认为0.1米修改为0.3米即可)
灵敏度值 :无需配置
区分人车:暂不支持,配置否
检测方向:是否滤除反向来车(面对雷达区分左右,公触发模式生效)
每项参数设置完成后,必须点击”设置成功“按钮保存设置,如下图:
过车中道闸落杆砸车原因排查
1、车辆冲杆问题:车辆现场有监控视频,通过视频判断是否车辆冲杆(道闸已经开始落杆了,车辆还是向前开到杆子底下)
2、使用规范问题:现场使用的雷达防砸,判断是否车辆大角度驶入或驶出雷达防砸区域
3、方案问题:通过的车辆为断层车辆,需要使用双线圈或者双雷达防砸方案,扩大防砸检测范围。
4、施工调试问题:根据现场通过的车辆类型检查线圈或者雷达安装规范(底盘高的车辆,防砸线圈需要切1.5米宽,防砸雷达安装下边沿离地70公分),根据使用的防砸线圈或者防砸雷达进行排查
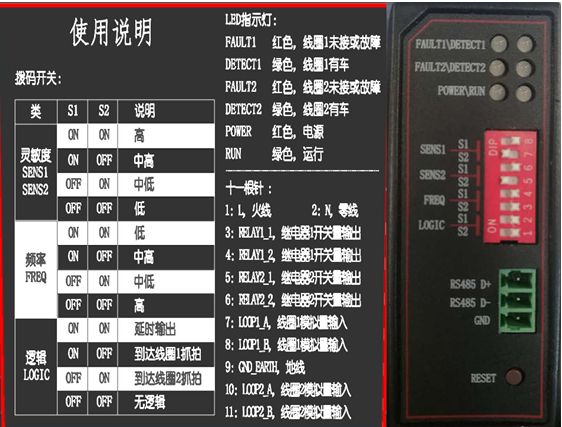
海康威视车检器故障排查
如果车检器存在故障,会造成道闸不落杆
车检器没有车的时候绿灯常亮或闪烁
1、检查车检器供电220V是否正常,测量道闸运行时车检器供电电压,电压在200V-240V之间;
2、检查车检器灵敏度拨码,降低车检器灵敏度测试;
3、存在多个车检器(一般为线圈混行车道)时还需检查车检器频率拨码,是否几个车检器的频率是否错频,相邻线圈接入的车检器频率需错到最大,一个车检器频率设置为低,另一个频率设置为高;
4、检查车检器和底座固定是否牢靠,如果晃动建议扎带固定;
5、检查线圈施工规范;
车检器没有过车经常误触发
故障现象:没有过车情况下,CH1\CH2 检测灯会亮绿灯或者检测灯狂闪绿灯。
处理方式:灵敏度设置为中高档,根据效果或者拨为中低档;检查线圈线是否完成双绞,完善双绞;检查车检器是否接地,完善接地。
车检器检测不到过车
故障现象:过车时,CH1\CH2 检测灯不亮,或者车身经过线圈时才能触发。
处理方式:灵敏度设置为中高档;检查线圈线是否完成双绞,完善双绞;检查车检器是否接地,完善接地。另外需注意,该场景中所过车辆类型及线圈切割的宽度是否合理,如不合理需及时反馈情况。
海康威视雷达故障故障排查
如果雷达存在故障,会造成道闸不落杆
雷达故障排查
一、检测状态异常
(1)雷达不触发(触发雷达后,雷达绿灯不亮)
1、人到雷达检测区域,绿灯不亮,车过去亮
回读雷达参数看看是不是设置了过滤单人,同时保证雷达版本为最新

2、车辆在雷达触发区域,雷达绿灯没亮
回读雷达参数,查看雷达检测区域是否设置的太小了,如果设置了栅栏杆/广告杆模式,杆子一侧0-1m的区域是雷达屏蔽不检测的,同样保证雷达版本最新
(2)雷达误检测,杆子来回起落,雷达检测到杆子
1、检查雷达供电是否正常,雷达供电要求DC12-1A以上,使用雷达自带适配器供电,严禁从道闸控制板上12V取电,道闸控制板上12V不稳定,道闸运行时存在压降;
2、检查雷达接线头是否做好绝缘(白、紫、绿、蓝),这四芯线在雷达调试好后用胶带分别包好,做好绝缘;
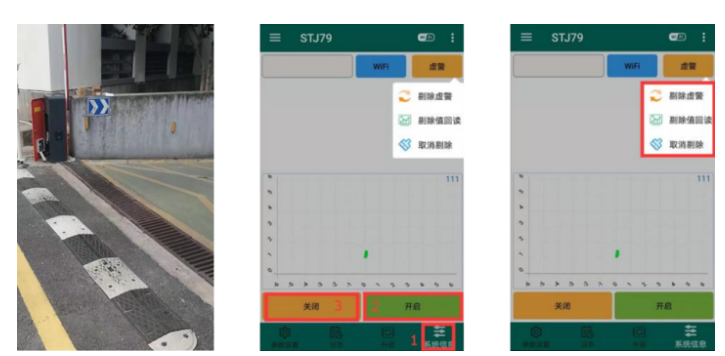
3、若上面排查正常则一般为检测到落下来的杆子,然后给防砸信号让杆子再抬起,杆子落下来的时候绿灯会亮,抬上去会灭,请打开安卓端上位机核实雷达版本查看雷达目标分布,具体如下操作:
①正确连接WiFi;
②回读雷达目前参数信息,读取参数—雷达信息,确保雷达版本为最新
③曲臂、伸缩直杆等道闸,查看是否是检测到了杆子中间的衔接处,系统信息里面点击开启,看是否有检测到虚警点,如果检测到了杆子可以将雷达检测模式改为栅栏杆模式来屏蔽掉杆子
④栅栏杆场景,杆子无法正常下落
1、先确定杆子安装正确,竖杆在远离雷达一侧
2、杆子安装正确,依然误触发
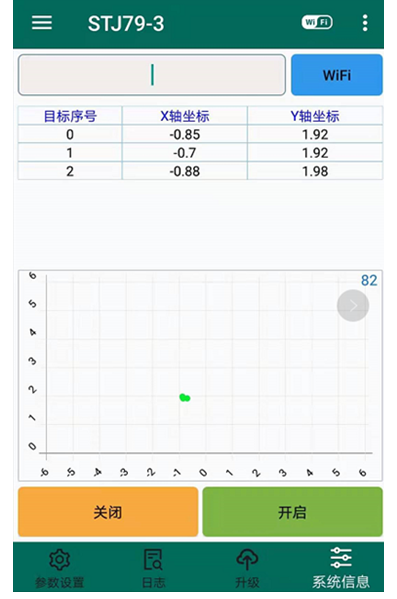
确认杆子的点都在一侧(杆子一侧)0-0.5m范围内,杆子在关到位状态,打开手机调试app,点击开启,查看雷达读到的杆子的点,如下左图为现场道闸关到位读取的虚警点,图中绿点即为读取的虚警点,X轴坐标为0的线即为法线,可以看到图中的虚警点X轴坐标超过了法线,可能是杆子有点歪或者雷达安装比较偏,可以把雷达右侧垫一点垫高,使得雷达读取到杆子的点都在法线一侧,如下右图虚警点都在法线右侧,X轴坐标都在0—0.5范围内,设置工作模式为栅栏杆模式时,0—0.5(现场杆子在雷达右侧,若杆子在雷达左侧则为-0.5—0)范围内的点雷达会过滤掉,这样杆子就不会触发雷达
3、栅栏杆为方形栅栏竖杆的(DS-TMG303),需设置工作模式为广告杆模式
(3)雷达误检测,雷达常亮绿灯,上电后范围内无目标绿灯常亮
注:雷达第一次上电绿灯常亮是正常情况,触发一次即可正常使用,若触发了还是常亮则开始排查
1、检查雷达供电是否正常,雷达供电要求DC12-1A以上,使用雷达自带适配器供电,严禁从道闸控制板上12V取电,道闸控制板上12V不稳定,道闸运行时存在压降;
2、检查雷达接线头是否做好绝缘(白、紫、绿、蓝),这四芯线在雷达调试好后用胶带分别包好,做好绝缘;
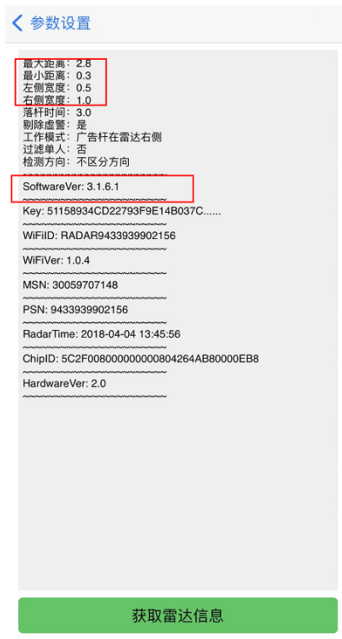
3、若上面排查正常则一般为检测范围内有虚警点引起,请打开安卓端上位机核实雷达版本查看雷达目标分布,具体如下操作:
①正确连接WiFi;
②回读雷达目前参数信息,读取参数—雷达信息,确保雷达版本为最新
③最远检测距离设置为雷达到闸杆尾部水平距离减去0.2米(触发雷达车道减去0.2米),点击“系统信息”中“开启”按钮;
④点击“关闭”按钮,虚警点坐标会显示在屏幕中,“X轴坐标”为雷达左右距离,“Y轴坐标”为雷达前方距离;
⑤杆子完全抬起后,在检测区域有固定的虚警点 ;
如果虚警点Y坐标小于1米,“最小距离”设置值大于虚警Y坐标即可,
如果虚警点Y大于等于1米,则开启剔除虚警。
⑥如上图场景,杆长4m,虚警点在Y轴 1-2m范围内,此时需确认固件版本:
此功能适用上位机:安卓端 app——V1.6 及其之后版本;
此功能版本:STJ79_3H_V3.X.3.7.bin 及之后版本;
⑦点击“剔除虚警”按钮,剔除虚警时雷达前方不能有人或车经过,杆为垂直状态,持续时间约5s,待回复设置成功后,剔除完成;
⑧点击“开启”按钮,查看是否还有虚警点,若仍有虚警点需重新剔除;
⑨点击“剔除值回读”按钮,与之前虚警点进行对比,看点分布是否一致, 若一致则剔除无误(剔除点与虚警点不会完全一致,但是分布上不会有大的差异)
注:使用剔除虚警功能需要把杆抬起操作,广告杆、栅栏杆水平状态使用此 功能会误把杆当做虚警剔除,导致检测不稳定。
4、若上电后范围内有目标,但是目标无法移开,绿灯常亮
如下场景左侧有虚警,-0.7:X轴坐标左侧最小值为0.7m,实际设置减去0.3m,需要把“左侧宽度”设置为0. 4m或更小。雷达计算检测范围时仅左侧、右侧宽度会外扩0. 3m,最远、最近检测距离按实际距离计算
二、检测状态异常
(1)雷达亮蓝灯
1、 雷达刚上电时会亮一下蓝灯,默认触发一下,然后即可正常工作,同时在升级成功后复位过程中蓝灯也会亮一下,随后即可正常使用
2、 若蓝灯常亮确认是否白紫线短接,此时断开白紫线即可;
3、 确认是否操作过剔除虚警功能,此时app上回读下固件版本就能正常;
4、若蓝灯2秒闪烁一次,无继电器动作声音,为秘钥丢失,沟通总部技术; 若蓝灯0.5秒闪烁一次,并伴随有继电器动作声音,为供电不足,确定雷达是否是独立适配器供电,更换供电查看是否跟供电有关,如果更换了正常电源情况依旧,沟通总部技术;
5、其他情况请联系总部技术确认问题。
(2)雷达红灯闪烁
1、检查雷达供电是否正常,雷达供电要求DC12-1A以上,使用雷达自带适配器供电,严禁从道闸控制板上12V取电,道闸控制板上12V不稳定,道闸运行时存在压降,调换电源试下是否是供电问题;
2、检查雷达供电接线是否正常,红色线接正极,黑色线接负极(仔细检查,晚上紫色和黑色易混淆),保证接头固定良好,其他接头做好绝缘
3、 如果排除不是供电和接线问题,则雷达内部元器件可能有损坏,则需要维修。
注:正常雷达运行,红灯常亮,代表电源灯,绿灯灭,代表没有触发到雷达,触发到雷达后绿灯会亮。
三、其它异常
雷达上电后搜不到WIFI
①确认雷达供电,DC12V,驱动电流大于1A;
②确认只有一台雷达上电,若多个重名WiFi,只会搜出一个,确认后正常连接完成请修改WiFi名称再调试另一台;
③若雷达正常工作仍无WiFi信号,咨询海康售后;
④雷达WiFi仅为方便技术调试,并不会影响雷达性能,如果现场急需调试,可以用电脑和串口线进行调试雷达;
⑤WiFi 连接成功后回读版本号,对应雷达绿灯会快速闪烁 5 秒,以判断连接雷达是否正确。
雷达上电后手机能搜到WIFI信号,并可正常连接,表示WiFi正常
默认WiFi名称:“AWHST_DZ_01”或“RADARxxxxxxxxxxxxx”(13位SN);
默认WiFi密码:“123456789”;
若忘记WiFi名称或密码,可通过RS485连接雷达蓝绿线复位WiFi名称与密码。
海康威视太阳能摄像机套装指示灯状态说明
摄像机指示灯
蓝色——慢闪——–网络连接成功,正常工作
蓝色——快闪——–等待网络连接
红色——常亮——–设备正常启动
红色——慢闪——–网络异常或设备未激活
红色——快闪——–存储卡或其他异常
负载机指示灯
黄色——常开——–负载开
指示灯不亮——–负载关
黄色——快闪——–负载短路或开路
黄色——慢闪——–过载
太阳能板指示灯
绿色——常亮——–电池板正常充电
指示灯不亮——–电池板电压低
绿色——快闪——–蓄电池超压
蓄电池指示灯
绿色————–常亮——–蓄电池正常
绿色————–闪烁——–蓄电池充满
红/绿(黄)—-常亮——–蓄电池欠压
红色————–常亮——–蓄电池过放