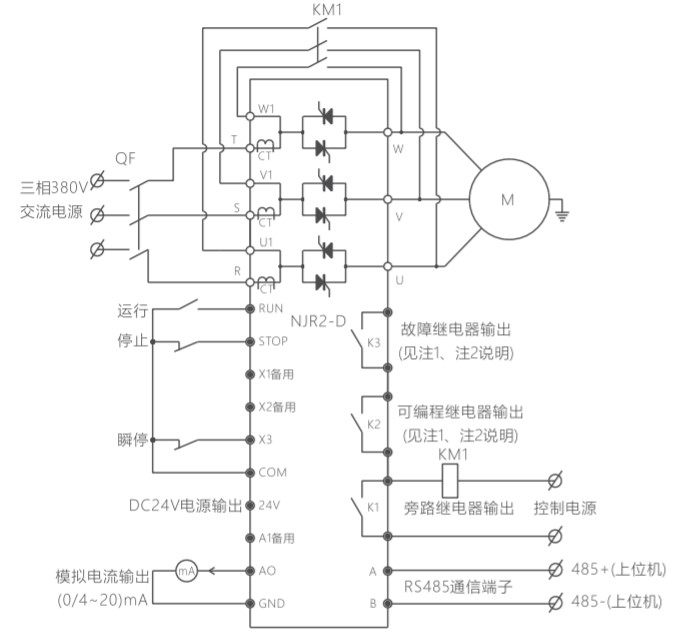
NJR2-D系列软起动器基本接线原理图:
注:
1、K3故障继电器在软起动器断电状态时是常闭的,在刚上电直到软起动器内部CPU开始工作的0.2s时间内K3还是常闭的,之后若没有故障K3变为常开,若有故障K3重新变为常闭;
2、若有要求用故障继电器的常开信号来控制本台产品的输入主回路,建议用K2可编程继电器来控制,同时必须把参数F17设置成6;
3、当用外部端子控制时,上电后必须检测到RUN端子信号有断开变闭合时才会起动软起动。
NJR2-D系列软起动器常用接线图:
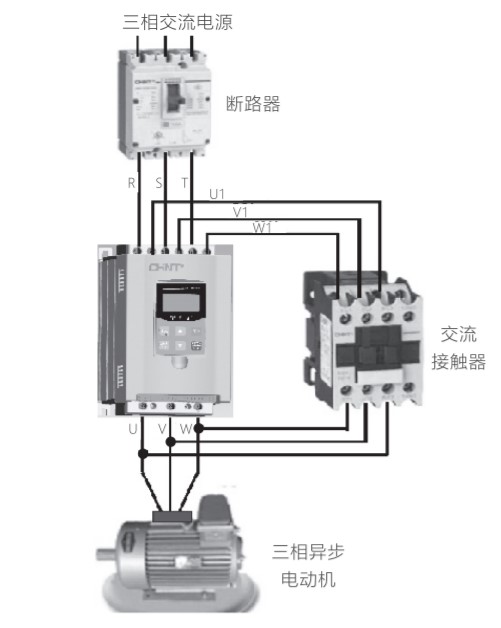

主电路端子接线说明:
R、S、T ————三相交流电源输入端子
U1、V1、W1——–旁路接触器输入主端子
U、V、W ———–旁路接触器输出主端子(即软起动器输出主端子,接至电动机)
注:
1、禁止在软起动器的输出端子(U、V、W)直接接电容器
2、当电动机旋转方向不对时,可交换(U、V、W)中任意两相的接线,但必须保证U1、V1、W1与输出 U、V、W 一一对应
3、外接旁路接触器时,必须要求接触器每一级的输入U1、V1、W1与输出 U、V、W 一一对应,如果接线不正确,切换至旁路时会造成电源短路,可能会损坏整个系统。
4、旁路接触器的闭合和释放必须完全由软起动器的K1继电器来控制,特别是软停时,如不通过软起动器的K1继电器来控制 旁路接触器的释放,可能存在软停过程中前端开关跳闸的风险
5、不要采用主电路电源ON/OFF方法来控制软起动器运行和停止,应待软起动器通电以后,选用软起动器上的控制端子或键盘面板上的RUN和STOP键控制运行和停止。
控制端子接线说明:
一、输入
RUN—————运行端子,与COM端子可进行两线、三线控制
STOP————–停止/复位端子,与COM端子可进行两线、三线控制
X1、X2———–备用
X3—————–瞬停端子,出厂时与COM端子短接:当该端子断开时,产品停止输出,并且报“瞬停端子开路”故障,主要用于意外时的紧急停机。
二、电源
COM————–开关量公共端,DC24V参考地。
DC24V———–DC24V输出电源,
注:
对COM端输出DC24V/100mA电源,与COM端之间不能接入超过100mA的负载
DC24V电源输出有一定误差,在使用前请确认该电压值是否满足您的要求,COM端为DC24V地,不能与GND端短接;注2:不能直接引入外部的直流或交流电源信号。
AO———–模拟输出(0mA~20mA或4mA~20mA输出)
0mA~20mA输出,即SW2拨码开关全部打到非ON位置,即0倍额定机型电流对应输出0mA,1倍额定机型电流对应输出5mA,2倍额定机型电流对应输出10mA,4倍额定机型电流对应输出20mA;
4mA~20mA输出,即SW2拨码开关全部打到ON位置,0倍额定机型电流对应输出4mA,1倍额定机型电流对应输出8mA,2倍额定机型电流对应输出12mA,4倍额定机型电流对应输出20mA。
A1———–备用
GND——–模拟量公共端(AO参考地)
K1———–旁路继电器(控制旁路接触器,触点容量5A 250VAC)
K2———–可编程继电器(该继电器由F17及F04共同决定其输出功能)
K3———–故障继电器(当有故障时该继电器动作)
A、B——-RS485通讯端口
注:
1、控制端子的旁路继电器K1最大输出能力只有5A,不可直接控制大功率的交流接触器,对于大于167A的交流接触器,建议使用中间继电器控制 。
2、禁止将部电源引入除K1、K2、K3之外的端子上
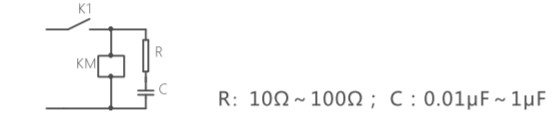
3、当K1、K2、K3控制外部接触器时,建议在接触器线圈两端并联一阻容回路,以有效抑制接触器动作时产生的浪涌电压,如下图: