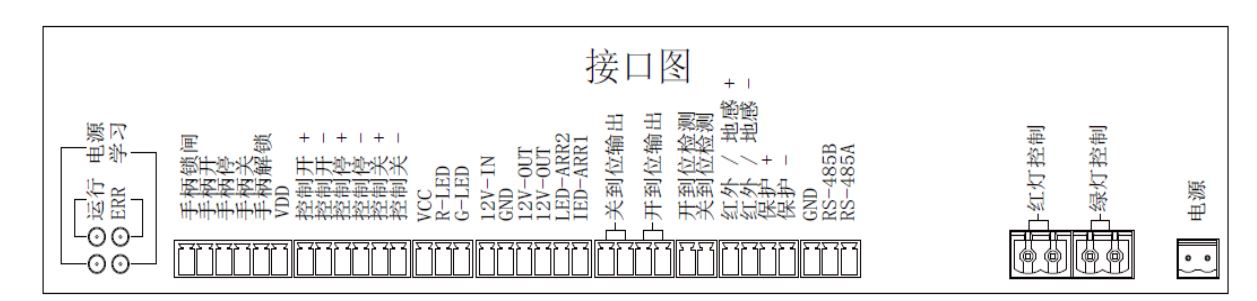
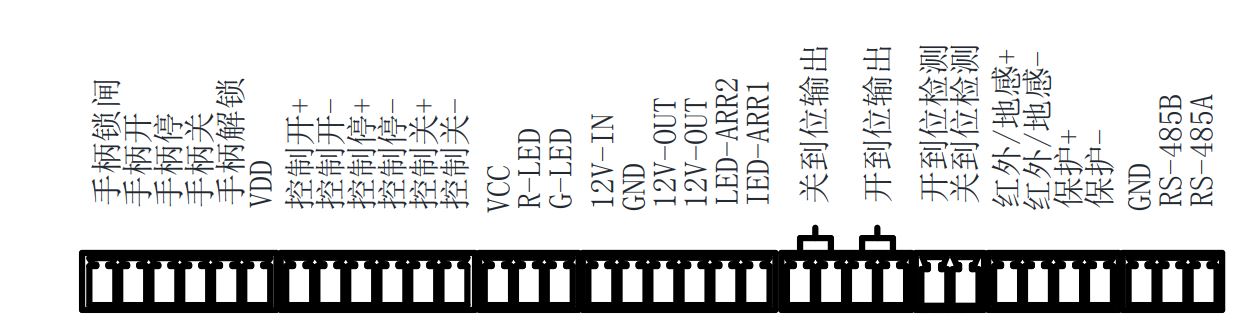
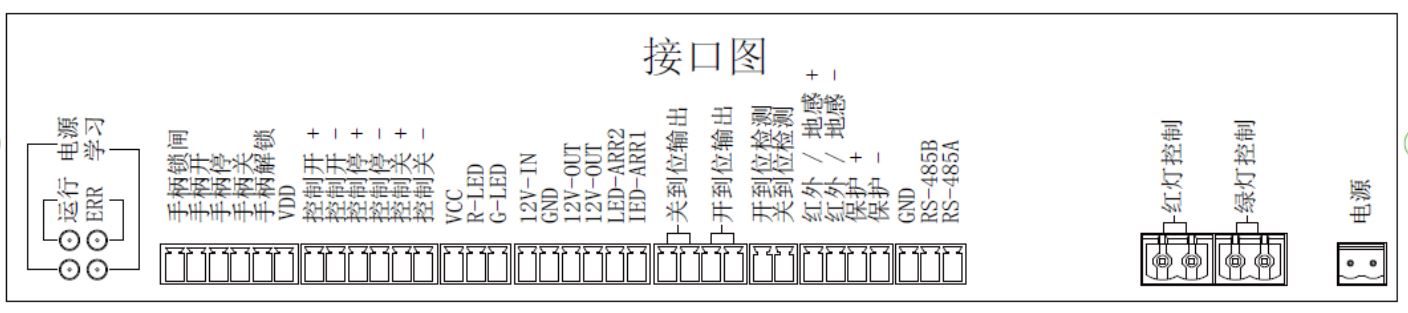
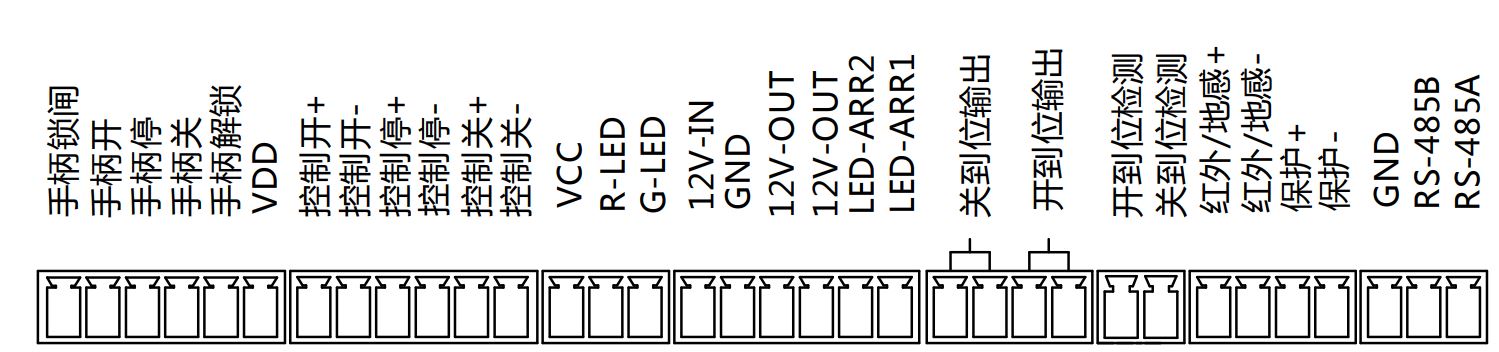
DS-TMG4B0系列道闸控制器接线如下图


DS-TMG4B0系列道闸控制参数设置
短按设置键显示 77,然后按开关键,显示会自动加一或者减一,显示到 79 则按设置键显示 F1 进入设置。此时按开关键会显示 F0–F9。选择 F0-F9 对应的参数然后按设置键进入设置。按开关来加减数值大小。再按设置键确定。在 F0-F9 界面按停止键退出参数设置。


计数模式功能说明
当多次输入开闸信号后,系统将自动计算通过地感的车辆数量,当通过地感的车辆数量等于输入的开闸信号次数时,道闸自动关闭。
计数模式开启需要将 F4 设置成 1,默认不开启。
车队模式功能说明
车队模式即常开模式。当需要通过一个车队若干辆车同时放行一起计费时可采用这个功能。当进入车队模式时,杆子始终处在开启状态,外部的开,关,地感等等信号都不起作用。
操作说明:
1、通过遥控器操作实现。长按遥控器的第四键“*”键,持续 6s 左右,杆子会开闸进入车队模式。按遥控器停止键退出,杆子落闸恢复正常模式。
2、通过按键操作实现。将 F5 设置成 1 进入车队模式,按停止键退出。杆子落闸恢复正常模式。
时间参数设置
短按设置键显示 77,然后按开关键,显示会自动加一或者减一,显示到 81 则按设置键显示 A3 进入设置。此时按开关键会显示 A0–A9。选择 A0-A9 对应的参数然后按设置键进入设置。按开关来加减数值大小。再按设置键确定。在 A0-A9 界面按停止键退出参数设置。


遥控器对码操作
按主板上遥控学习键一次,主板遥控学习指示灯将会点亮,然后持续按住遥控器上的任意键,直到指示灯闪烁熄灭,表示对码完成。重复此操作,可学习多个遥控器代码。
遥控器清码操作
按住主板上遥控学习键不放,主板遥控学习指示灯将会点亮,持续约 10 秒钟后,指示灯将会自动闪烁熄灭,表示清码操作完成。