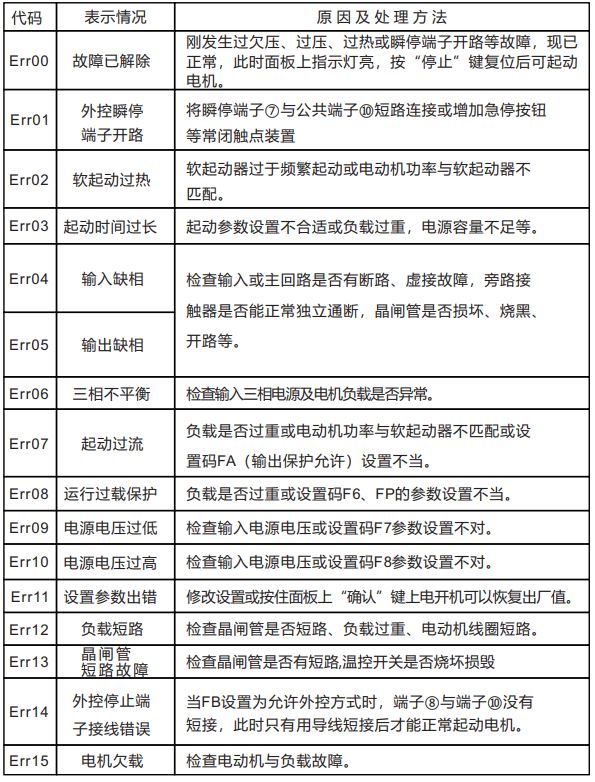
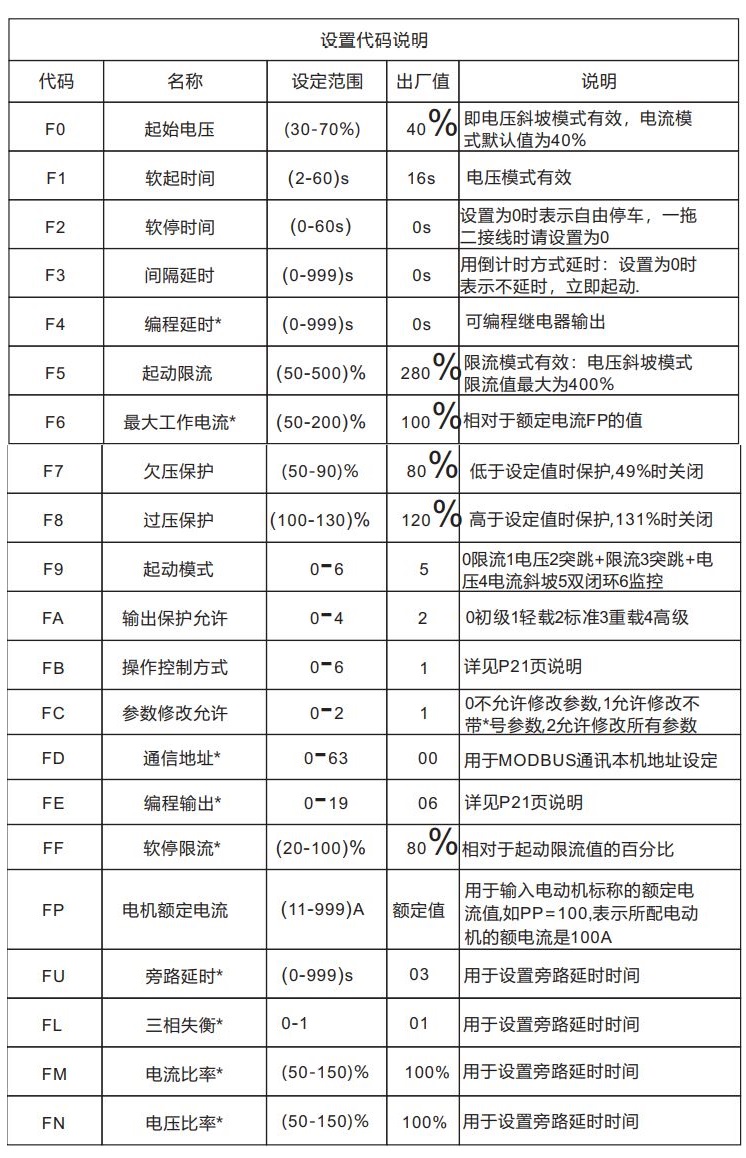
RDJR6系列软启动器功能参数设置代码如下表
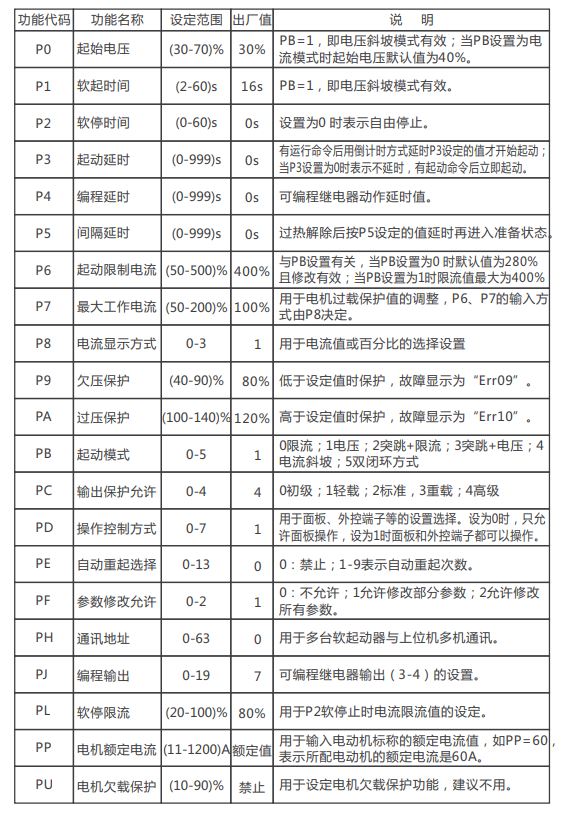

功能代码说明:
(1)P0 —–起始电压
可设定范围(30~70)%Ue。当起动模式PB设为电压时有效。主要用于设定软起动起始力矩的大小,该值设置越大则起动力矩越大,同时起动电流也越大。一般在重负载时可适当调大,以产生较大起动转矩,达到正常起动的目
的。
(2)P1 —–起动时间
可设定范围(2~60)s。该值用于设定电压斜坡上升时间的参考值,实际起动时间要看负载的轻重,产品会自动检测判断电压斜坡上升到旁路切换时间,其它起动模式的切换时间也是如此。
(3)P2—– 软停时间
可设定范围(0~60)s。当该值设置为0时,表示自由停车,即有停止信号后断开旁路接触器起动器也无输出电压。该参数如果设置一定时间,则软起动器在有停止信号后,先断开旁路接触器,再通过调节晶闸管对电动机施加一个低电压使其按斜坡逐渐减速,避免快速停止,这类停止方式能够降低水泵水锤效应的损害作用,如水泵类可设置2s~6s,但软停时间设置较长,会出现电流波动现象。
当使用软停时,可用FF设置限流值,以减少软停时的大电流冲击,软停限流值由F5与FF的乘积决定。
注:出厂时该参数设置为自由停车,一般设备建议都使用该模式。 当一台软起动
器拖动多台电动机时(如一拖二),必须将F2设置为0,即自由停车方式。
(4)P3—– 间隔延时
可设定范围(0~999)s。当有起动命令后,按该设定值时间倒计时,当计为0时立即起动。
(5)P4—– 编程延时
可设定范围(0~999)s。用于PJ可编程继电器在延时多长时间动作,如设置为0则立即动作。
(6)P5—– 间隔时间
用于配合设置码PE(重起动允许)的间隔时间设定
(7)P6—– 起动限制电流
可设定范围(50~500)%或(1~6000)A。用于设定软起动器带电动机起动时的最大限制电流,即当软起动器输出电压增大时,其输出电流将保持在该设定值以内,直至电动机完成起动。该参数与P8、PB设置有关
可设定范围:(50~100)%Ie或者(1~6000)A。当P8设为0、2时,该设定值显示电流值,而不是百分比。该参数用于实际电动机过载倍数的调整,如设为80%,则表示当负载输出电流大于PP的80%时,开始过负载计时。建议用户一般不要修改此参数。
(8)PB—– 电流显示方式
可设定范围:0~3.该参数用于选择P6、P7的输入方式和运行时,面板的显示方式。

注:当P6、P7为百分比时,是指代码PP所设定的电动机额定电流值的百分比。当更改P8后,P6中的值并非对应转换,请确认代码P6的值是否满足要求

(9)P9—– 欠压方式
可设定范围:(40~90)%Ue。用于设定低于额定电压的百分数的动作值。
(10)PA—– 欠压方式
可设定范围:(100~140)%Ue。用于设定高于额定电压的百分数的动作值。
(11)P8 —–起动模式
可设定范围:0 限流;1 电压;2 突跳+限流;3 突跳+电压;4电流斜坡;5 双闭环;
RDJR6具有6种不同的起动模式,适用于不同的电动机和负载情况,可根据不同的应用范围进行相应的选择。
①限流起动模式
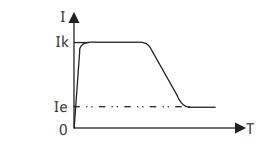
设置PB为0时为限流起动模式。上图给出了限流起动模式的电动机电流变化曲线。其中Ik为P6设置的起动限流值,当电动机起动时,当输出电流迅速增加,直到电动机电流达到设定的限流值Ik,直到电动机电流达到设定的限流值Ik,并保持电动机电流不大于该值,然后随着输出电压的逐渐升高,电动机逐渐加速,当电动机达到额定转速时,旁路接触器吸合,输出电流下降到电动机额定电流Ie或以下,起动过程完成。当电动机负载较轻或设定的限流值较大时,起动时的最大电流达不到设定的限流值时属于正常。限流模式一般用于对起动电流由严格限制要求的场合。
②电压斜坡起动模式
设置码 PB为1时为电压斜坡起动模式。上图给出了电压斜坡起动模式的电压输出曲线。其中U1为P0设定的起始电压值当电动机起动时,当电动机起动时,在电动机电流不超过额定值的400%的范围内,软起动器的输出电压迅速上升到U1,然后输出电压按照所设定的起动参数逐渐上升,电动机随着电压的不断上升平稳加速,当电压达到额定值Ue时,电动机达到额定转速,旁路接触器吸合,起动过程完成。起动时间t1是根据标准负载在标准实验条件下得到的控制参数,RDJR6系列软起动以此参数为基准,通过控制输出电压有效值使电机平稳加速以完成起动过程,并非机械地控制起动时间t1而不论电机加速是否平稳。这是与其它起动方案的本质区别,因此在负载较轻时,起动时间往往小于P1设定的起动时间,只要能顺利起动则属正常。
一般而言,电压斜坡起动模式适用于对起动电流要求不严而起动平稳性要求
较高的场合。
③突跳限流起动模式
设置码PB设为2时为突跳限流起动模式
④突跳电压起动模式
设置码PB设为3时为突跳电压起动模式
关于突跳限流起动模式和突跳电压起动模式的说明:在某些重载场合下,由于机械静摩擦力的影响而不能起动电动机时,可选用这两种起动模式。在起动时,先对电动机施加一个较高的固定电压并持续有限的一段时间,以克服电机负载的静摩擦力使电动机转动,然后按照限流或电压斜波的方式起动。在用这两种模式前,应先用非突跳模式起动电动机,若电动机因机械静摩擦力太大而不能正常转动时,再选用突跳限流起动模式或突跳电压起动模式,否则避免采用这两种模式,以减少不必要的大电流冲击。
⑤电流斜坡起动模式
设置码PB设为4时为电流斜坡起动模式,电流斜坡模式具有较强的加速能力,适用于两极电动机,也可在一定范围内缩短起动时间。
⑥电压限流双闭环起动模式
设置码PB为5时为电压限流双闭环起动模式。电压限流双闭环起动模式采用电压斜坡和限电流双闭环回路控制,是一种既要求起动较平稳又要求严格限制电流的综合起动模式,它采用了估算电动机工作状态的预测算法。该起动模式的输出电压曲线将根据电动机和负载情况的不同而有所变化。

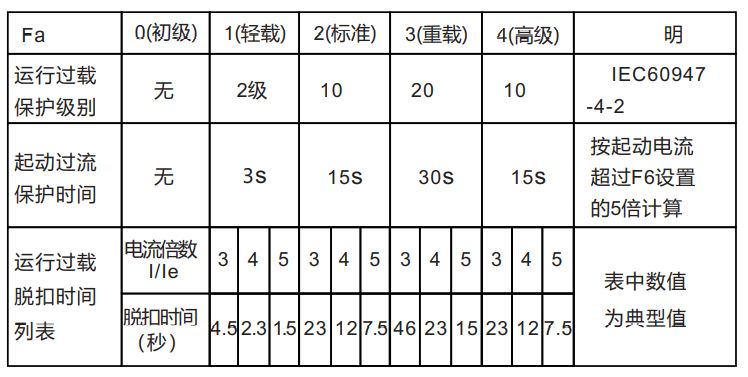
(9)PC —– 输出保护允许
可设定范围:0 初级:1 轻载:2 标准:3 重载:4 高级
该参数主要用于设置软起动器对电动机的热过载保护级别。
初级:初级保护禁止了外控瞬停端子的功能,同时保留了过热、短路、主回
路故障保护,适用于需紧急起动的场合,如消防系统。
轻载、标准、重载这3个保护级别分别具备完全的保护功能,区别在于电动机
过载热保护反时限的曲线不同。
高级:高级保护在起动时的保护标准更为严格,其它保护功能参数与标准保
护设置相同。
设置码 PC设定的不同保护级别和热保护时间如下表: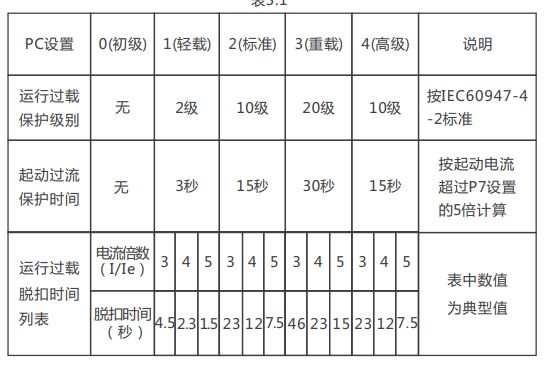
注:设置时,请根据实际使用的电动机的热过载能力设置,电动机保护必须
符合相应的保护等级。

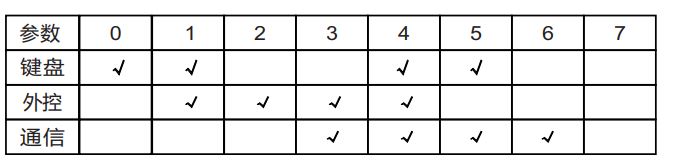
(10)PD—– 操作控制方式
可设定范围:0-7.用于选择软起动的起动控制方式,如下表
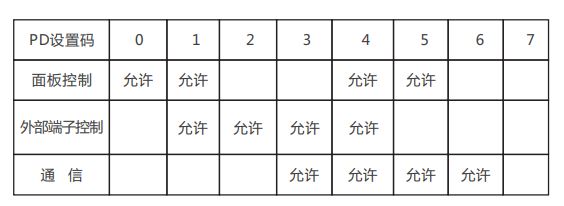
注:
当外控端子控制允许时,外控端子⑧和⑩之间必须接一常闭按钮或短接,否则无法正常起动电机,会报”Error 14″故障。
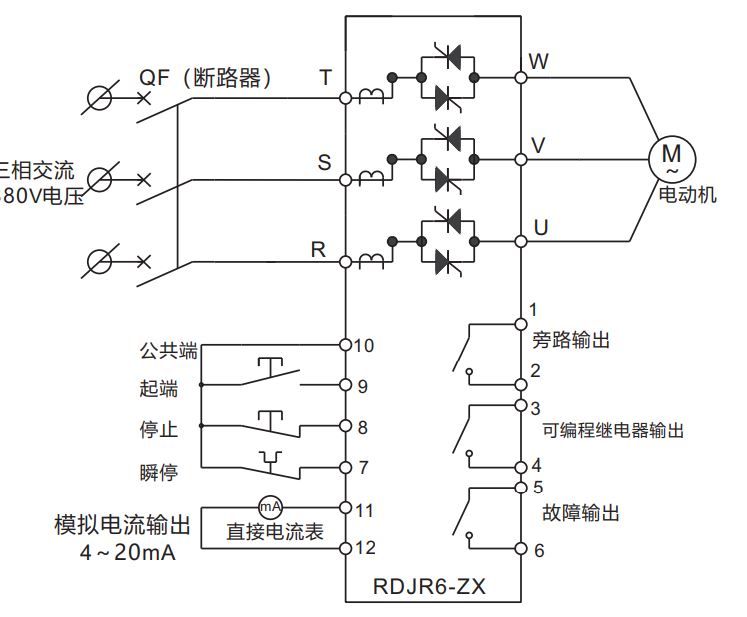
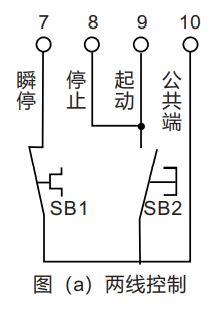
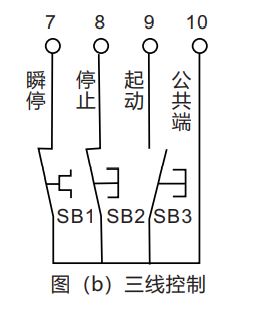
若起动后不允许意外停止,或维修时不允许意外起动,可把FB设置为7,即禁止所有起动或停止操作。当外控端子允许时,有两种接线方式,即两线控制方式和三线控制方式,具体接法如下图:
两线控制:如图(a),当SB1在常闭状态下,SB2闭合时起动,SB2断开时停止,断开SB1后为瞬停。
三线控制:如图(b),当SB1在常闭状态下,按下SB3(瞬时信号)时起动,按下SB2(瞬时信号)后停止,断开SB1后为瞬停。



(11)PE—–自动重起允许
可设定范围0~13.当PE设置为0时,自动重起无效
当PE设置为1~9时,将允许自动重起,此功能仅外控两线方式有效,并且不受操作控制方式PD的控制,重新送电后延时60秒软起动会自行起动器。
1、设置码PE设置为1~9,其中1~9表示包括送电起动和发生故障后重新起动在内可自动起动的次数,自动重起必须重新送电开机才能生效,且每次重新送电
都再次生效。
2、当发生故障停机后,经延时60秒后重新起动,但当设置码P5的设置时间大于60秒时,则按P5设置的时间延时,延时期间显示板上状态指示灯闪烁。
3、 设置码PE设置为10时,禁止失电保护功能。送电时,若外控端子已处于闭合状态,则自动起动电机,即允许送电起动。
4、 设置码PE设置为11时,瞬停后可再起动,即当外控瞬停端子⑦未被禁止(设置码PC>0),发生过瞬停、过压、欠压、过热等故障并恢复时,不需自复位即可起动电机。
5、设置码PE设置为12时,禁止失电保护功能,且瞬停后可再起动。
6、设置码PE设置为13时,运行状态记忆恢复功能,即在旁路状态下断电且再来电时,软起动会自动起动恢复到旁路运行状态。
注:本软起动具有失压保护功能,即断电且又来电后,无论外控端子处于
何种设置状态,均不会自行起动,避免造成伤害事故。但当PE自动起动设置为允
许、禁止失电保护、允许运行状态记忆恢复功能时,失去电保护功能都将失效。
(12)PF —–参数修改允许
可设定范围:0~2.
1、当设置为0时,只允许修改设置码PF的参数,其它设置码的参数都禁止修改;
2、当设置为1时,只允许修改设置码P0、P1、P2、P3、P5、P6、P9、PA、PB、PC、PD、PP的参 数,其它设置码P4、P7、P8、PE、PH、PJ、PL、PU的参
数都禁止修改;
3、当设置为2时,允许修改所有参数。
(13)PH—–通信地址
设定范围:0~63.用于上位机控制多台软起动时地址的设定
(14)PJ—–编程输出
可设定范围:0~19.用于设定可编程输出继电器的动作时刻
可编程继电器输出功能有两种工作方式,即可编程时序输出方式和可编程状态输出方式。①设置码PJ为0~4和10~14时,可编程输出工作于时序输出方式,
具体如下:
1、 此工作方式包含一个999秒定时器,由设置码P4设定。若P4不为0,则按设置码PJ设定的起始时刻计时,计时时间到0则输出开始改变状态;若设置码P4为0,则立即改变输出状态。该输出的复位时刻是在按P4设置时间延时结束且在准备状态下维持1s时。
2、可编程时序输出方式是以一次起动过程为控制周期的,如果再次起动电机则自动中断上次编程输出过程并重新启动该过程。
②设置码PJ为5~9和15~19时,可编程输出工作于状态输出方式,具体如下:3、可编程状态输出方式用于指示软起动器的工作状态,此方式下设置码P4设置的时间无效。
4、设置码PJ出厂值为7,即指示软起动器的准备工作状态,此状态下可以起动电机。可编程输出为故障状态时,是指电机类故障,如Err05、Err06、Err07、Err08、Err12、Err15,它不同于⑤号、⑥ 号故障输出端子功能。运行状态是指非准备或故障状态,它包括起动、旁路、软停三个过程。
5、当PJ>9时,可编程输出③号、④号外控端子的复位状态由常开变为闭合,即反相输出。灵活运用可编程继电器输出功能,可有效地简化外围逻辑控制线路。
(15)PL—–软停限流
可设定范围:(20~100)%。此软停限流值是F5起动限制电流值的百分比,例如:F5设置为400,FF设置为80,那么软停限流倍数为:电机额定电流的400%×80%=3.2倍。
(16)PP —–电机额定电流
可设定范围:11~1200A。用于设定软起动器所带电动机的额定电流值的设定,其范围为软起动额定功率(单位:kW)的(50~200)%,例如:软起动的额定功率为30kW,那么PP值可设定范围为(15~60)A。
设置码PP在恢复出厂值之后,会自动变为电动机功率的2倍数值,此时,软起动的过流值、过负载均按该值处理,请按照所用电动机铭牌上的额定电流值输入设置码PP,以达到保护的最佳状态,否则当设置码P6、P7的电流显示方式(由设置码P8设定)为百分比方式时,显示面板上显示的起动电流和保护电流会有较大偏差。设置码PP设定的值不能低于电动机额定电流的20%,当PP设定的电动机电流较小时,保护脱扣器动作灵敏度误差将增大。
(17)PP —–电机欠载保护
可设定范围:(10~90)%。用于设定电机欠载保护功能。
欠载保护电流范围为电动机额定电流的(10~90)%,由设置码PU的十位数确定。
欠载保护延时范围为5~90秒,由设置码PU的个位乘以10来确定,当PU的个位数为0时,保护动作延时为5秒。例如:设置码PU=42,则表示欠载电流为40%,保护动作延时时间为20秒。
只有电动机所拖动的负载工艺上有此要求时,才考虑选择欠载保护功能,
一般情况下不用。
当设置码PU<10时,表示禁止电动机欠载保护功能。