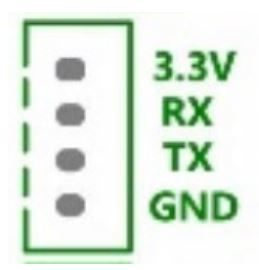
强电接线
市电 AC220 接到电控柜里面的空气开关进线处,从空开出线处接至速通门自带适配器,PE 线接至速通门箱体。
过桥线接线

注:配合识别终端使用时,需考虑识别终端之间连接的通讯网线。
识别终端接线

IC 读卡器接线

消防接线



强电接线
市电 AC220 接到电控柜里面的空气开关进线处,从空开出线处接至速通门自带适配器,PE 线接至速通门箱体。
过桥线接线
注:配合识别终端使用时,需考虑识别终端之间连接的通讯网线。
识别终端接线
IC 读卡器接线
消防接线
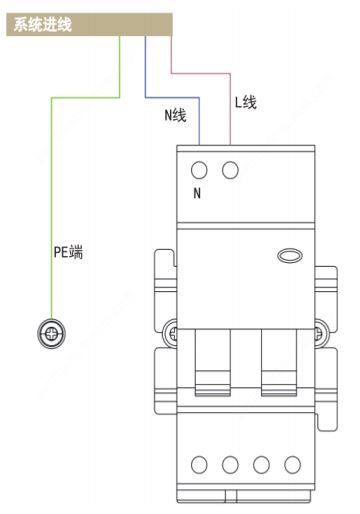
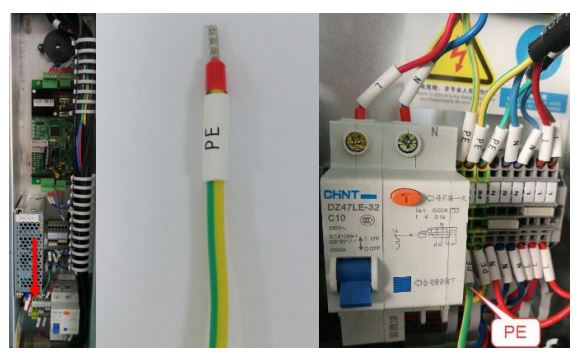
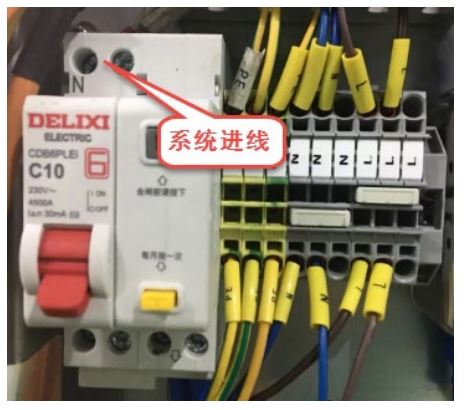
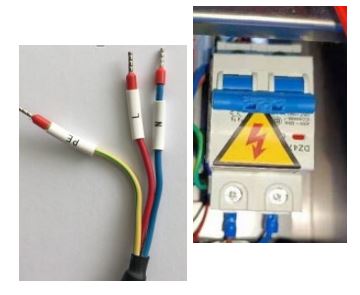
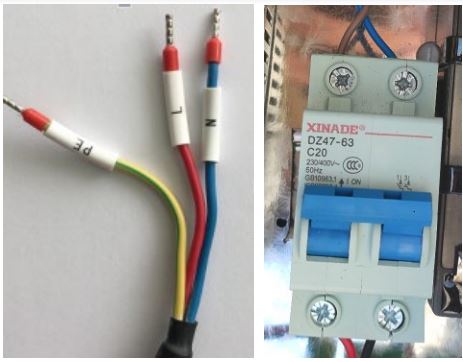
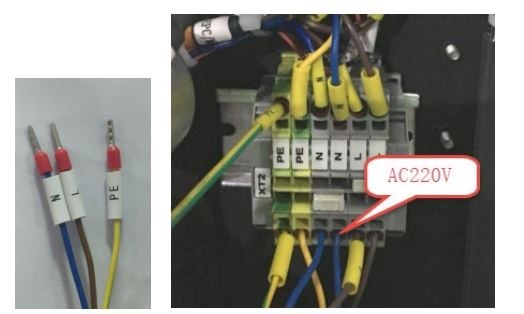
系统进线
市电 AC220 接到电控柜里面的空气开关上,标识为 L、N、PE。空开上面为 L、N,黄绿色的为 PE 端子,过线槽的 PE 线也接入 PE 端子(有时根据需求不同,L、N、PE 端子数量会有所不同)。
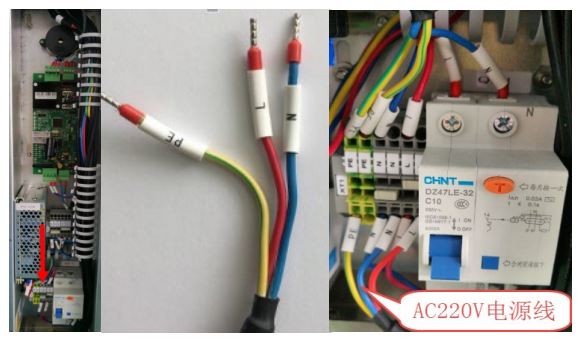
AC220V 电源线
总线标为 AC220V-OVR,分线标为 L、N、PE,接到 L、N、PE 端子。
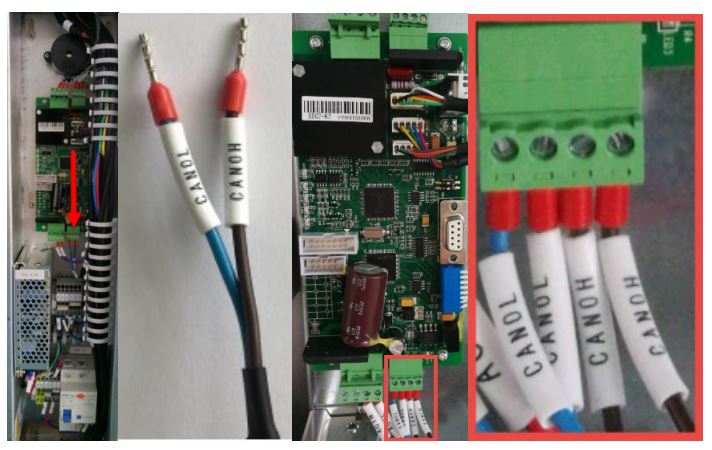
机芯通讯线缆
总线标为 CAN0-B,分线标为 CAN0H、CAN0L,过地下线槽接入右侧箱体机芯控制器 MCR 上。
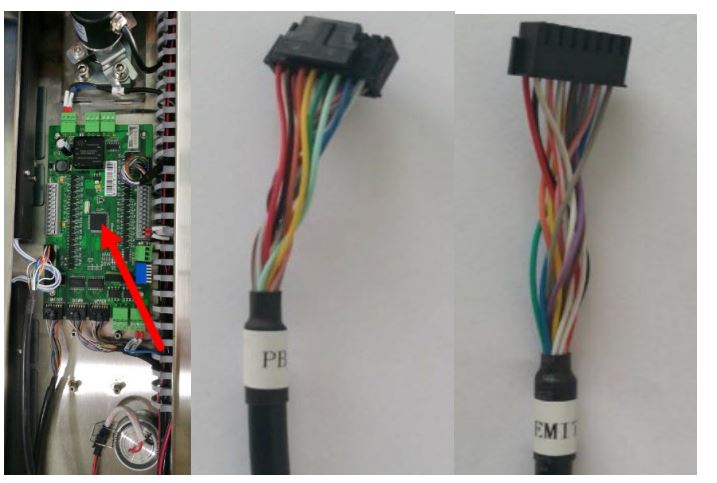
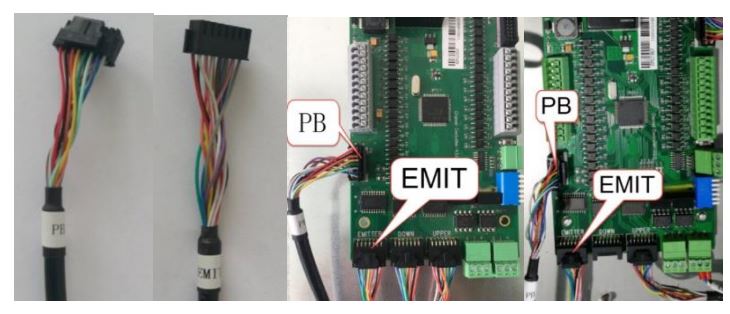
红外发射线缆 EMIT 和端子板 PB 线缆
红外发射线缆 EMIT(光幕线)为 14*28AWG 线缆,端子板 PB 线为 16*28AWG 线缆,接入电控柜中间的通道控制器上(有时设备不需要接下光幕,接入有所不同)。
红外发射线缆 EMIT 和端子板 PB 线缆如下图:
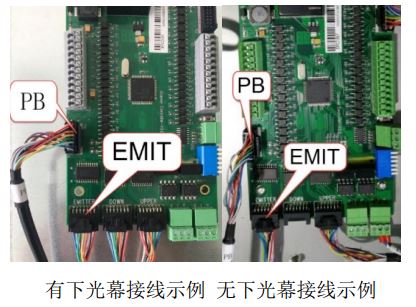
有下光幕接线 和无下光幕接线如下图:
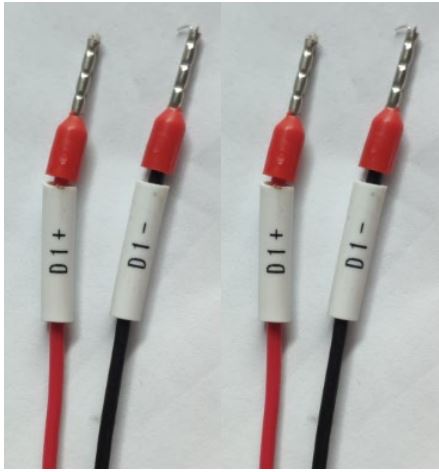
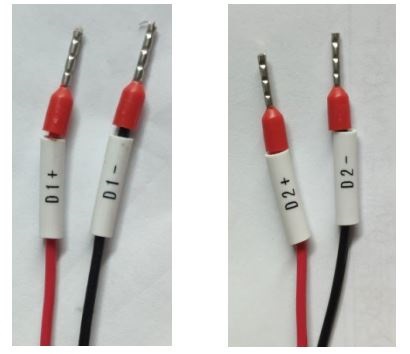
开门信号线
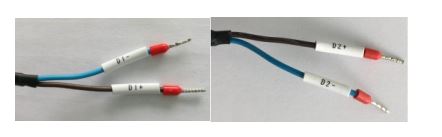
开门信号线为 2 根两芯线缆,总线标为 D1 和 D2,分线标为 D1+、D1-和 D2+、D2-,预留在闸机箱体内。
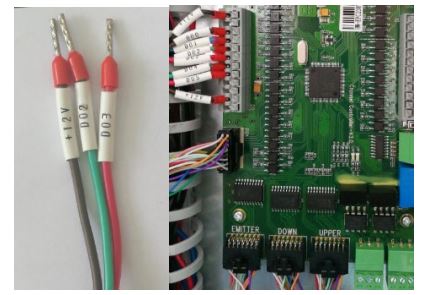
通行指示灯线
总线标为 LED3-EPC,分线标为 12V、DO2、DO3,接到通道控制器上面。
读卡器信号线
读卡器信号线,安装于闸机上,线缆预留在相应位置。
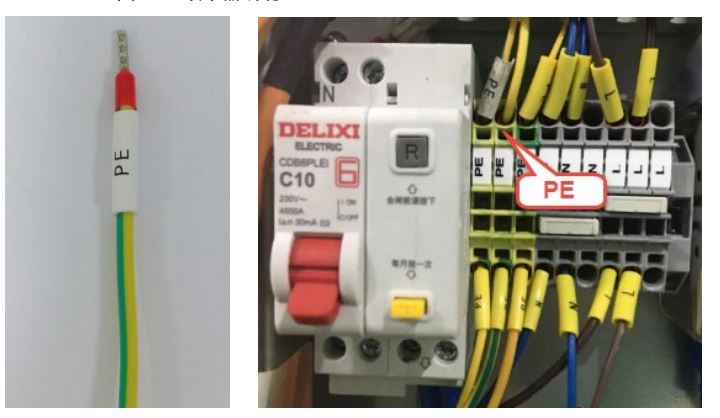
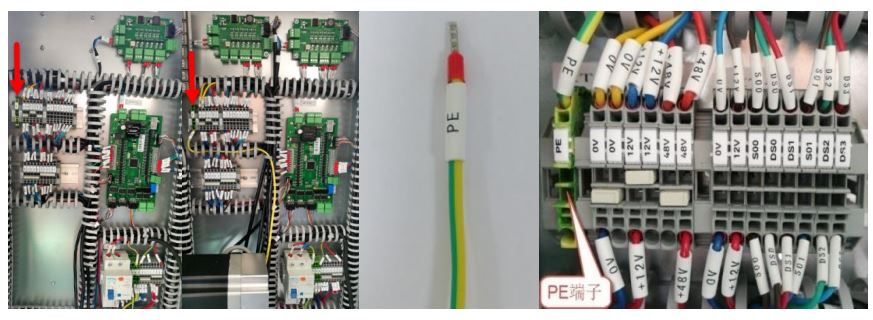
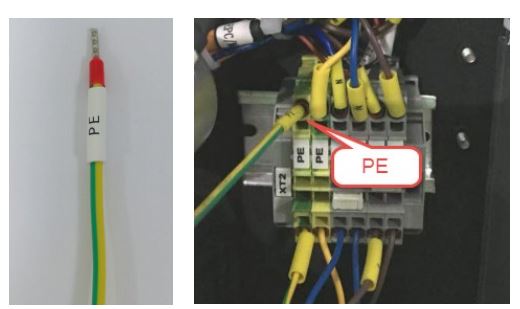
PE 线缆
线标为 PE,接入到 PE 端子上
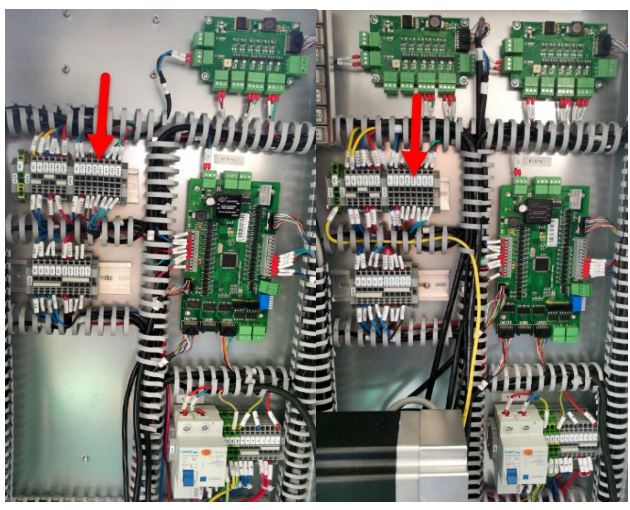
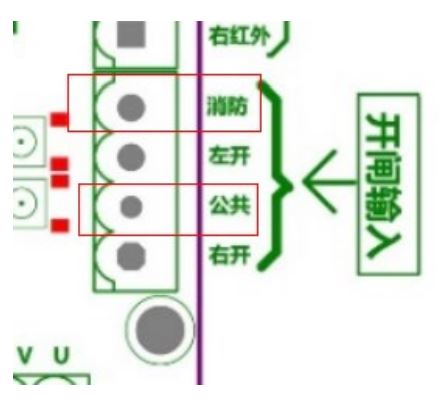
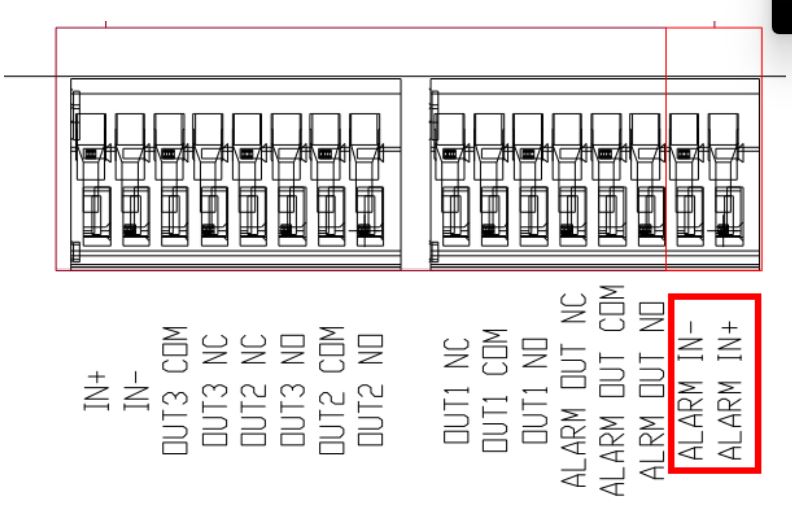
紧急模式信号接入

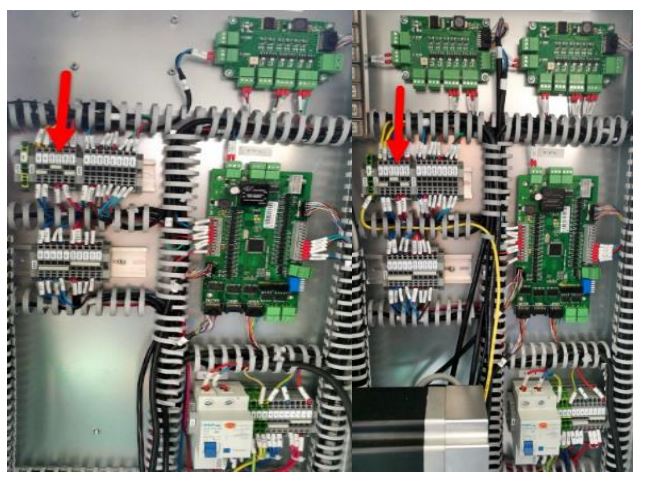
有时为了应对消防等紧急状态下,需要接入火灾报警信号,信号必须为开关量信号,接入端子板 A的 DI1、0V 两个端口,如上图方框 1 所示。
在发生火灾时,报警信号由端子板 A 输入到通道控制器,通道控制器接收到信号以后将通道改为紧急模式,闸门打开,自由通行。然后可以切断电源。
对于有 UPS 的系统,在系统断电后,通道控制也会改为紧急模式,闸门打开,自由通行。对于无 UPS 的系统,在系统断电后,闸门可以手动自由移动,自由通行。
I/O 信号接入将人脸识别终端 I/O 信号线接入如上图方框 2 所示,控制闸门打开通行。
系统进线
市电 AC220V 接到电控柜里面的空气开关上端,分线标为 L、N、PE。空开上面为 L、N,黄绿色的为 PE 端子,过线槽的 PE 线也接入 PE 端子,端子数量由需求而定
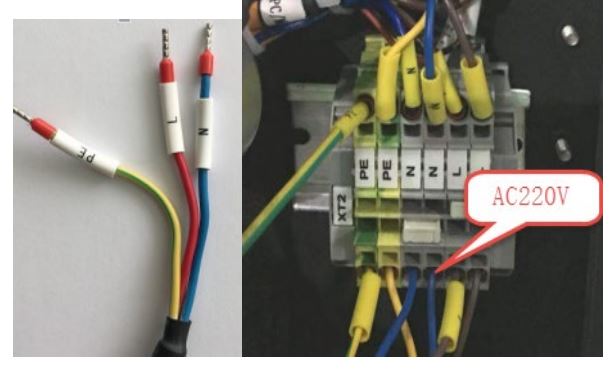
AC220V 电源线
总线标为 AC220V-OVR,分线标为 L、N、PE,过地下线槽接到 AC220V 端子上。
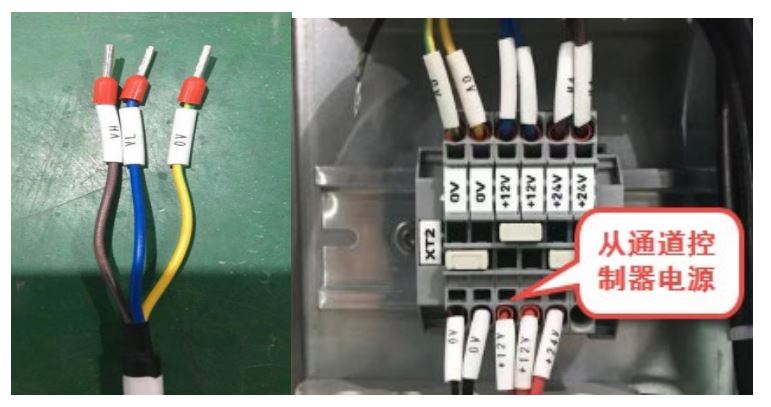
从通道控制器电源线
总线标为 EPC/S,分线标为 VH、VL、0V,过地下线槽接到接线端子上
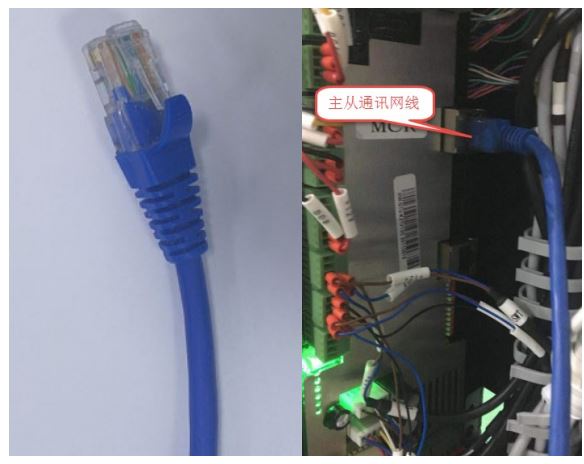
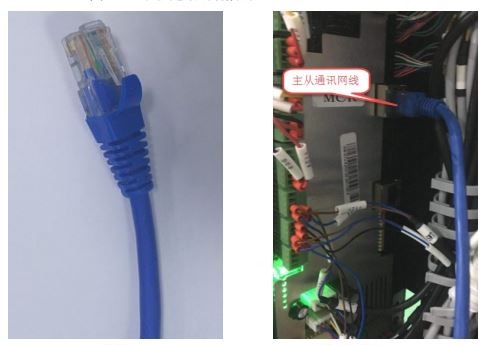
主从机通讯线缆
为一根网线,接入穿墙网口
开门信号线缆
开门信号线为两根,总线标为 D1 和 D2,分线标为 D1+、D1-和 D2+、D2-,预留在闸机箱体。
核验头电源线
核验头电源线共两根圆孔线,总线标为 PS-12V/A 和 PS-12V/B,预留在闸机横梁

PE 线缆
线标为 PE,过地下线槽接入到 PE 端子
系统进线
市电 AC220 接到电控柜里面的空气开关上,分别为 L、N、PE。空 开进线为 L(火线)、N(零线),黄绿线为 PE 接地(有时根据需求不同,L、N、PE 端子数量会有所不同
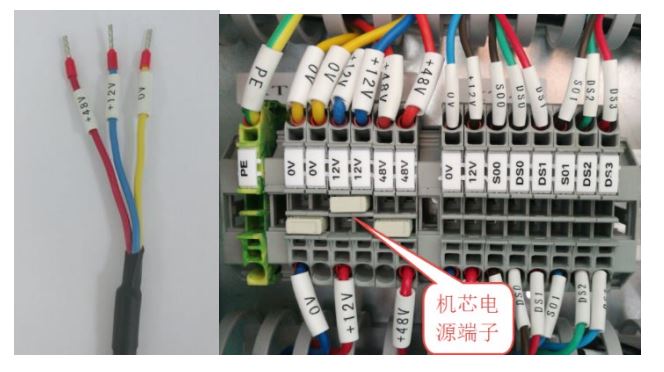
机芯电源线
机芯电源线缆,分线标为 0V、+12V、+48V,接到机芯电源端子上面。
右边道位置图中间道位置图(单通道无)
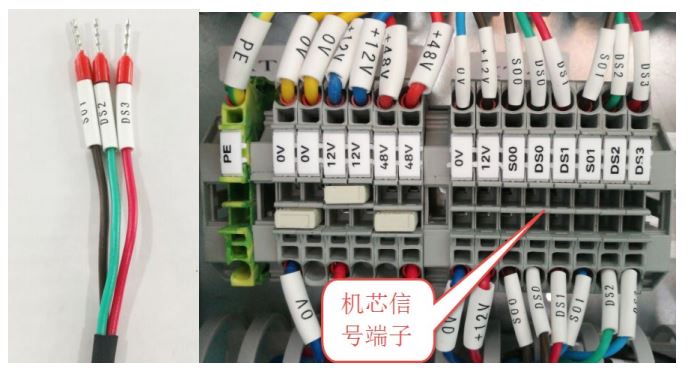
机芯电源端子
机芯信号线
总线标为 SI,分线标为 SO1、DS2、DS3,接到机芯信号端子上面。
右边道位置图中间道位置图(单通道无)
机芯信号端子
机芯信号电源线
总线标为 DC12V-M2,分线标为+12V、0V,接到机芯信号端子上面。
右边道位置图中间道位置图(单通道无) 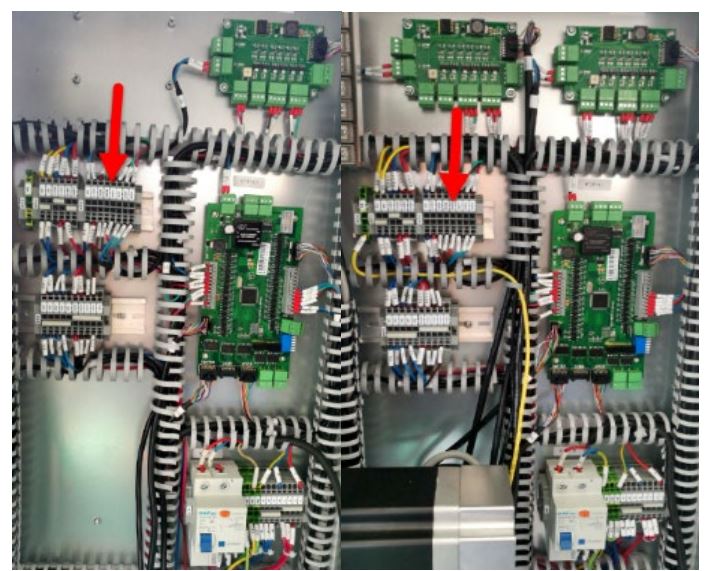

红外发射线缆 EMIT 和端子板 PB 线缆
红外发射线缆 EMIT(光幕线)为 14*28AWG 线缆,端子板 PB 线为 16*28AWG 线缆,接入电控柜中间的通道控制器上(有时设备不需要接下光幕,接入有所不同)。
右边道位置图中间道位置图(单通道无)
红外发射线缆 EMIT(光幕线)和端子板 PB 线
通行指示灯线
总线标为 LED3-EPC,分线标为 12V、DO4、DO5,接到通道控制器上面。
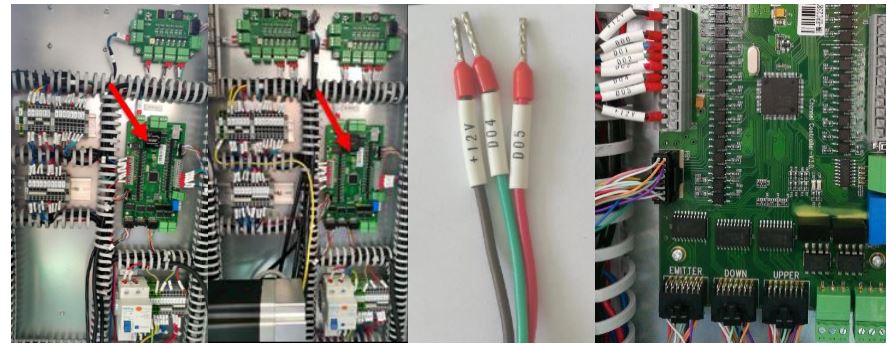
开门信号线
开门信号线为两根,总线标为 D1 和 D2,分线标为 D1+、D1-和 D2+、D2-,预留在闸机核验头横梁下方。
PE 线缆
线标为 PE,接入到 PE 端子上。
紧急模式信号线和 I/O 信号线

紧急模式信号接入
有时为了应对消防等紧急状态下,需要接入火灾报警信号,信号必须为开关量信号,接入端子板 A的 DI1、0V 两个端口,如上图方框 1 所示。
在发生火灾时,报警信号由端子板 A 输入到通道控制器,通道控制器接收到信号以后将通道改为紧急模式,将闸门打开,自由通行。然后可以切断电源。
对于有 UPS 的系统,在系统断电后,通道控制也会改为紧急模式,闸门打开,自由通行。
对于无 UPS 的系统,在系统断电后,闸门可以手动自由移动,自由通行。
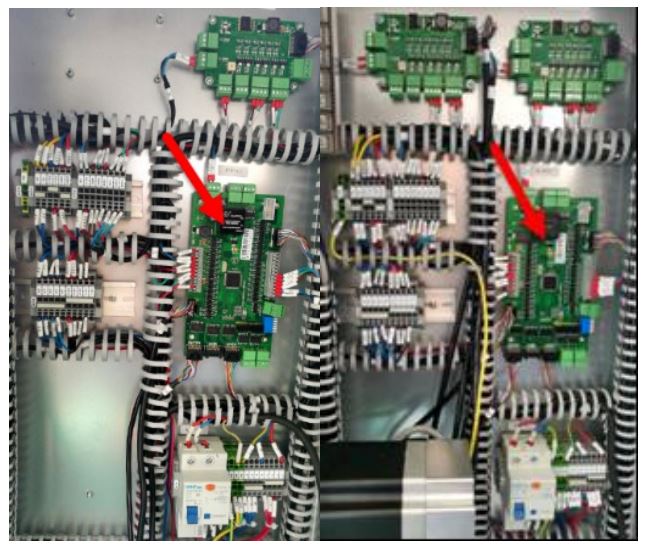
I/O 信号接入
将人脸识别终端 I/O 信号线接入如上图方框 2 所示,控制闸门打开通行。
设备出厂时,通道内部的电气连接线缆已经连接完毕,用户安装时只需要连接过
桥线及对应的核验设备,并接入市电 AC220V 为整个系统供电
系统进线
市电 AC220 接到电控柜里面的空气开关上,分别为 L、N、PE。空 开进线为 L(火线)、N(零线),黄绿线为 PE 接地(有时根据需求不同,L、N、PE 端子数量会有所不同
AC220V 电源线
总线标为 AC220V-OVR,分线标为 L、N、PE,接到 L、N、PE 端子

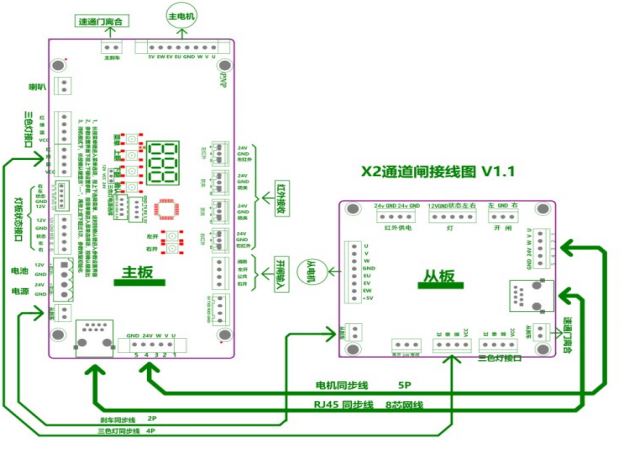
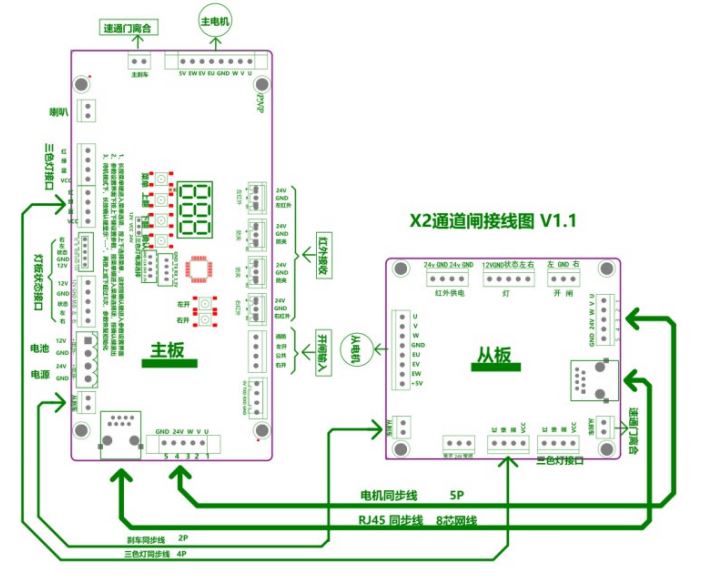
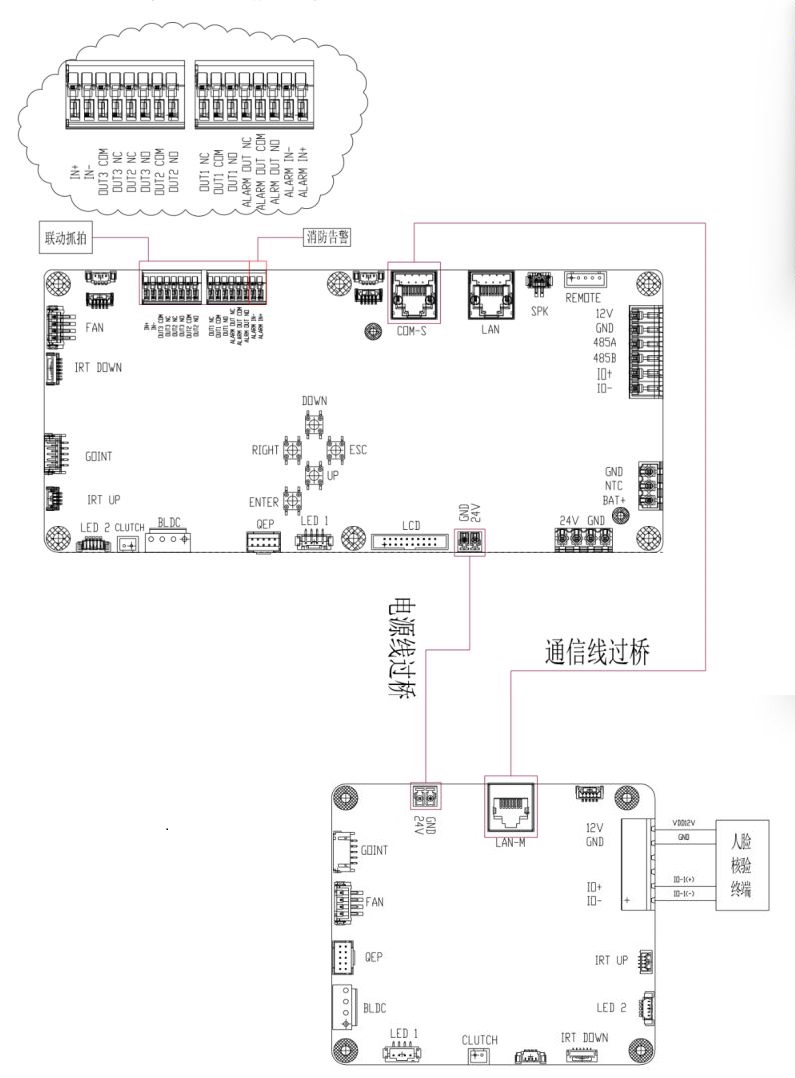
控制板接线
控制板接线含主机控制板接线与副机控制板接线
注:主机控制板上人脸核验终端接线可参考副机控制板
主机控制板(位于右边机与中间机内)主要用于控制红外、连接部件(喇叭、 遥控器
等)、为副机控制板供电与通信等。
副机控制板主要用于控制电机、外接人脸核验终端、控制状态指示灯等


过桥线接线
过桥线完成闸机间的通信、供电连接,保证设备正常工作。电机同步线、过桥电源线
必须连接,过桥线接线参考上图中的“控制板接图”
注:
1、主机控制板上人脸核验终端接线可参考副机控制板。
2、两根过桥线,其中一根是电机同步线(尾端为凤凰端子),一根是电源连接线(尾端为凤凰端子)
3、将强电电缆线和弱电电缆线分别用 3/4″PVC 线管穿好,并用水泥埋到相应的位置,保证互不干扰,并铺设在槽位内。
4、 穿线管内所有线缆穿过后的总面积不能超过穿线管截面积的 50%,一是 导线散热的需要,二是方便穿线。
6、 禁止私自从本主控制板上取电供给其他设备,由此引起的电路板损坏不属保修范围。
消防接线
闸机支持接入消防信号,与楼宇消防联动。


人脸核验终端接线
人脸核验终端 IO 口接入副机控制板后可控制闸机开门

注:左开代表进向开门;右开代表出向开门。
人脸核验终端供电口

设备出厂时,通道内部的电气连接线缆已经连接完毕,用户安装时只需要连接过
桥线及对应的核验设备,并接入市电 AC220V 为整个系统供电
系统进线
市电 AC220 接到电控柜里面的空气开关上,分别为 L、N、PE。空 开进线为 L(火线)、N(零线),黄绿线为 PE 接地(有时根据需求不同,L、N、PE 端子数量会有所不同
AC220V 电源线
总线标为 AC220V-OVR,分线标为 L、N、PE,接到 L、N、PE 端子。该款闸机 AC220V电源接入线缆已经接好,直接将插头插电使用即可。
控制板接线
控制板接线含主机控制板接线与副机控制板接线
注:主机控制板上人脸核验终端接线可参考副机控制板
主机控制板(位于右边机与中间机内)主要用于控制红外、连接部件(喇叭、 遥控器
等)、为副机控制板供电与通信等。
副机控制板主要用于控制电机、外接人脸核验终端、控制状态指示灯等。
过桥线接线
总过桥线缆 3 根,分别为电机同步线、RJ45 同步线、三色灯同步线。(该款设备无需接刹车同步线)
过桥线接线参考上图中的“控制板接图”
注:
1、主机控制板上人脸核验终端接线可参考副机控制板。
2、 三根过桥线,其中一根是通信过桥线(尾端为网口,超五类网线),一根是电源线(尾端为凤凰端子),一根是三色灯同步线(尾端为凤凰端子)。
3、将强电电缆线和弱电电缆线分别用 3/4″PVC 线管穿好,并用水泥埋到相应的位置,保证互不干扰,并铺设在槽位内。
4、 通信网线采用超五类及以上的优质网线,传输线路不应太长,传输距超 过 80 米时,应增加信号增强设备或考虑使用光纤的方式来进行数据传输。
5、 穿线管内所有线缆穿过后的总面积不能超过穿线管截面积的 50%,一是 导线散热的需要,二是方便穿线。
6、 禁止私自从本主控制板上取电供给其他设备,由此引起的电路板损坏不属保修范围。
消防接线
闸机支持接入消防信号,与楼宇消防联动。
人脸核验终端接线
人脸核验终端 IO 口接入副机控制板后可控制闸机开门,可控制闸机开门
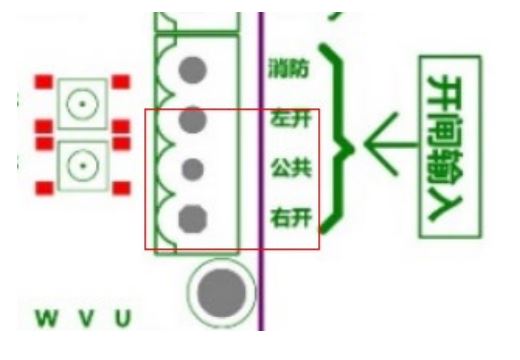
注:左开代表进向开门;右开代表出向开门。
抓拍报警设备接线
抓拍设备(IPC 等)与闸机连接后,闸机有异常情况比如尾随、闯入、发生 故障时,闸机自身蜂鸣器报警,同时触发连接的抓拍设备进行抓拍
抓拍设备的接线端子说明可咨询厂家,该款接口为 RS232 接口,如果需要依靠 RS485 通信,则需要接入 RS485 转换器
设备出厂时,通道内部的电气连接线缆已经连接完毕,用户安装时只需要连接过
桥线及对应的核验设备,并接入市电 AC220V 为整个系统供电
系统进线
市电 AC220 接到电控柜里面的空气开关上,分别为 L、N、PE。空 开进线为 L(火线)、N(零线),黄绿线为 PE 接地(有时根据需求不同,L、N、PE 端子数量会有所不同
AC220V 电源线
总线标为 AC220V-OVR,分线标为 L、N、PE,接到 L、N、PE 端子
控制板接线
控制板接线含主机控制板接线与副机控制板接线
注:主机控制板上人脸核验终端接线可参考副机控制板
主机控制板(位于右边机与中间机内)主要用于控制红外、连接部件(喇叭、 遥控器
等)、为副机控制板供电与通信等。
副机控制板主要用于控制电机、外接人脸核验终端、控制状态指示灯等
过桥线接线
总过桥线缆 3 根,分别为电机同步线、RJ45 同步线、三色灯同步线。(该款设备无需接刹车同步线)
过桥线接线参考上图中的“控制板接图”
注:
1、主机控制板上人脸核验终端接线可参考副机控制板。
2、 三根过桥线,其中一根是通信过桥线(尾端为网口,超五类网线),一根是电源线(尾端为凤凰端子),一根是三色灯同步线(尾端为凤凰端子)。
3、将强电电缆线和弱电电缆线分别用 3/4″PVC 线管穿好,并用水泥埋到相应的位置,保证互不干扰,并铺设在槽位内。
4、 通信网线采用超五类及以上的优质网线,传输线路不应太长,传输距超 过 80 米时,应增加信号增强设备或考虑使用光纤的方式来进行数据传输。
5、 穿线管内所有线缆穿过后的总面积不能超过穿线管截面积的 50%,一是 导线散热的需要,二是方便穿线。
6、 禁止私自从本主控制板上取电供给其他设备,由此引起的电路板损坏不属保修范围。
消防接线
闸机支持接入消防信号,与楼宇消防联动。
人脸核验终端接线
人脸核验终端 IO 口接入副机控制板后可控制闸机开门
注:左开代表进向开门;右开代表出向开门。
抓拍报警设备接线
抓拍设备(IPC 等)与闸机连接后,闸机有异常情况比如尾随、闯入、发生 故障时,闸机自身蜂鸣器报警,同时触发连接的抓拍设备进行抓拍
注:设备出厂时,基本的电气连接线缆已经连接完毕,安装时只需要连接过桥线。
接线说明:
接线之前,需要对闸机进行部分拆卸,详见下图。


注:
1、用 H5 六角扳手拆掉顶盖下面的 4 颗 M6 内六角螺栓,拆掉顶盖。
2、使用钥匙打开闸机侧面维修锁。
3、 完成接线后,锁好闸机侧面维修锁及固定好闸机顶盖,再拧紧 M6 内六角
螺栓。
系统进线
市电 AC220 接到电控柜里面的空气开关上,分别为 L、N、PE。空 开进线为 L(火线)、N(零线),黄绿线为 PE 接地(有时根据需求不同,L、N、PE 端子数量会有所不同)
AC220V 电源线
该线为自备电源线,根据颜色不同分别表示 L、N、PE 端,分别接到 L、N、PE 端子
控制板接线
控制板接线含主机控制板接线与副机控制板接线
注:主机控制板上人脸核验终端接线可参考副机控制板
主机控制板(位于右边机与中间机内)主要用于控制红外、连接部件(喇叭等)、为
副机控制板供电与通信等。
副机控制板主要用于控制电机、外接人脸核验终端、控制状态指示灯等。
过桥线接线
过桥线完成闸机间的通信、供电连接,保证设备正常工作,过桥线接线参见上图中的“控制板接线图”
注:
1、主机控制板上人脸核验终端接线可参考副机控制板。
2、 过桥线置于黄色盒子内并黏贴在右边机、中间机的门框附近的机箱上。
3、两根过桥线,其中一根是通信过桥线(尾端为网口,超五类网线),一根是电源线(尾端为凤凰端子)。如丢失、损坏等,用户可自备,要求电源线为 1.5 平方毫米的四芯铜芯线,凤凰端子间距 5.08mm;通信过桥线需为超五类八芯网线。
4、 过桥线长 5M,需按强弱分开布设于外径 40mm*壁厚 2.0mm 的 PVC 穿线管中,保证互不干扰,并铺设在槽位内。
5、通信网线采用超五类及以上的优质网线,传输线路不应太长,传输距超过 80 米时,应增加信号增强设备或考虑使用光纤的方式来进行数据传输。
6、穿线管内所有线缆穿过后的总面积不能超过穿线管截面积的 50%,一是导线散热的需要,二是方便穿线。
消防接线
闸机支持接入消防信号,与楼宇消防联动
人脸核验终端接线
人脸核验终端 IO 口接入主/副机控制板后可控制闸机开门。设备间接线参考上图中的“控制板接线图”
抓拍设备接线
抓拍设备(IPC 等)与闸机连接后,闸机有异常情况比如尾随、闯入、发生 故障时,
闸机自身蜂鸣器报警,同时触发连接的抓拍设备进行抓拍。设备间 接线参考上图中的“控制板接线图”
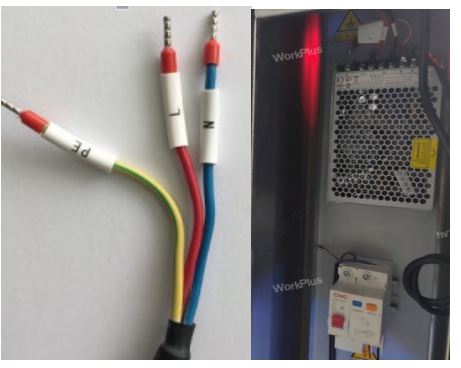
市电 AC220V 接到电控柜里面的空气开关上端,分线标为 L、N、PE。空开上面
为 L、N,黄绿色的为 PE 端子,过线槽的 PE 线也接入 PE 端子,端子数量由需求而
定。
速通门电源空开接线示意图

机芯电源线:
线标为 AC220V-OVR,分线标为 L、N、PE,过地下线槽接到 AC220V 端子上
从通道控制器电源线:
总线标为 EPC/S,分线标为 VH、VL、0V,过地下线槽接到接线端子上。

主从机通讯线缆:
为一根网线,接入穿墙网口
开门信号线:
开门信号线为两根,总线标为 D1 和 D2,分线标为 D1+、D1-和 D2+、D2-,预留在闸机箱体。
核验头电源线:
核验头电源线共两根圆孔线,总线标为 PS-12V/A 和 PS-12V/B,预留在闸机横梁。

PE 线缆:
线标为 PE,过地下线槽接入到 PE 端子上。如下图
安装完毕后,检查接线有无错误,是否有短路现象,确保没有问题后,再通电测试。
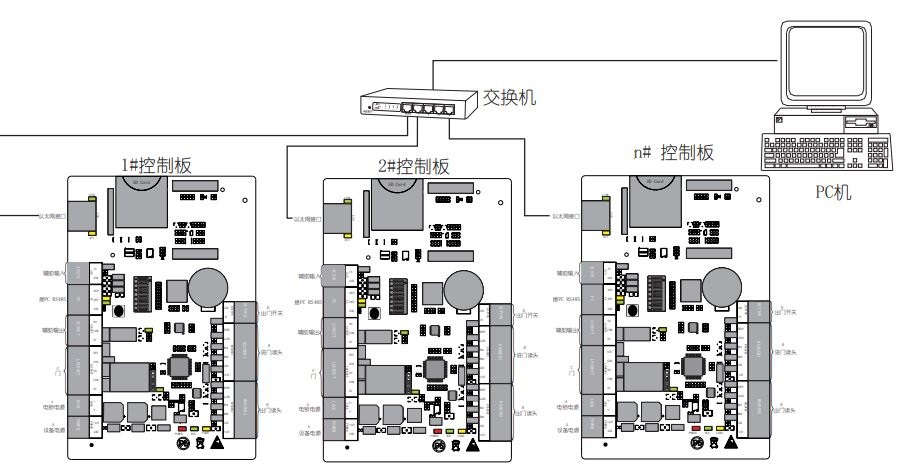
注:后台PC软件可通过2种通讯方式(RS485、TCP/IP)与设备通讯,进行数据交换和远程管理,通信线尽量远离高压电线,不要与电源线平行布线,更不能捆扎在一起。
一、TCP/IP通讯方式
二、RS485通讯方式
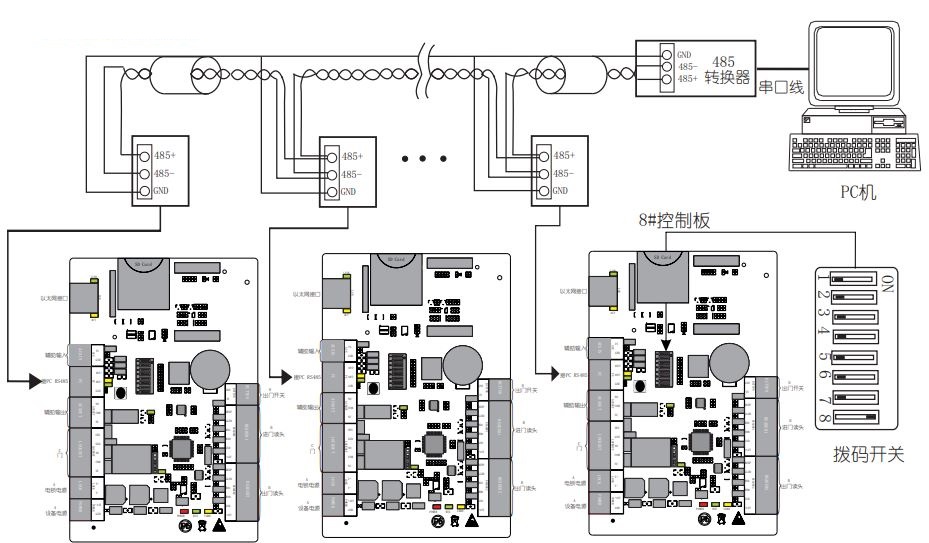
注:
1)RS485 通讯线采用国际通用的 RWSP(屏蔽双绞线),这样可有效屏蔽干扰。
2) RS485 通信线应使用总线制级联连接。RS485 通讯的总线建议在 600 米以内。
3)单条RS485总线能接63台门禁控制板,建议接32台以下。
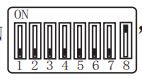
5)当 RS485 总线长大于 300 米时,为了增强通讯的稳定性,需将第一台和最后一台机的拨码开关的第8位拨到”ON”位。
如上图需将1#和8#机的拨码开关的第8位拨到“ON ”的位置