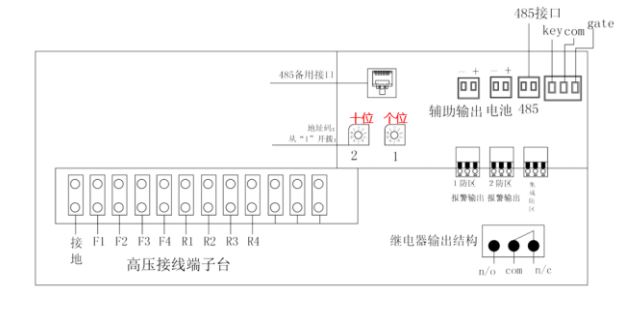
输入输出如下图:

1~21号端子接线说明

22~46号端子接线说明



输入输出如下图:
1~21号端子接线说明
22~46号端子接线说明
空闲时执行计划任务,方式类似于windows系统的屏幕保护程序 ,即在多长时间内,计算机没有任何操作时,自动启动屏幕保护程序
首先创建一个计划任务,详细步骤请参阅:
windows11系统中创建计划任务的操作方法
任务创建完成后,找到创建的任务(本例中还以创建的“计算器”任务为例)
依次点击:系统工具->任务计划程序->任务计划程序库
找到任务的任务:“计算器”,在任务名称上点击鼠标右键,在弹出的菜单中,点击“属性”

弹出计划任务属性窗口,点击“触发器”标签栏,删除“触发器”,否则会与空闲时执行计划任务产生冲突

删除完成后,点击“新建”按钮,创建一个触发器,点击红色方框区域的下拉列表框,选择“空闲状态”


点击“确定”
点击“条件”标签栏

显示如下 窗口

“仅当计算机空闲时间超下列值才启动此任务”:
即计算机空闲超过多长时间,所创建的计划任务才启动(如设置为5分钟)
“等待空闲时间”
列表框中的值选择“不等待”

设置完成,点击“确定”即创建完成
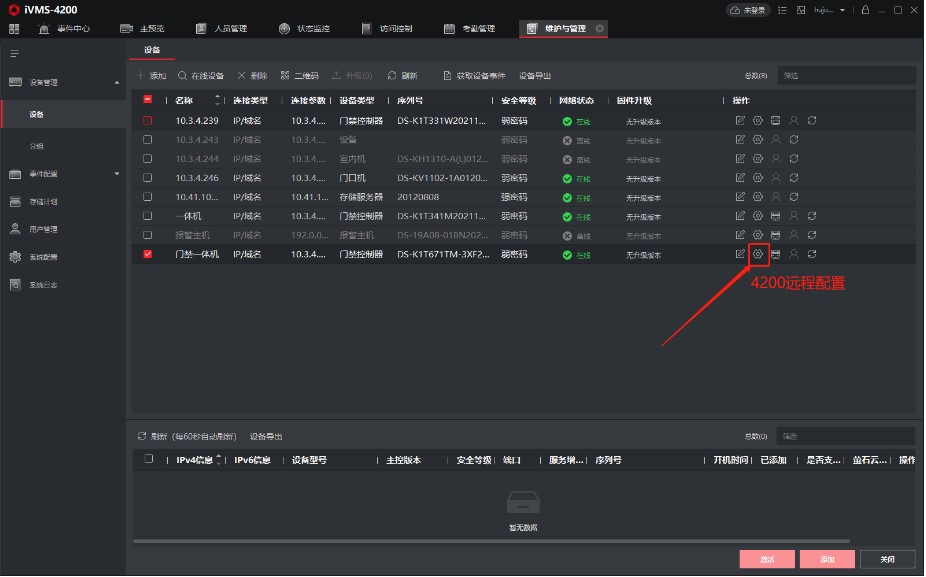
1、4200-访问控制-计划模板,检查计划模板是否涵盖当前刷脸时间,建议可以设置成0-24h

2、访问控制-权限管理-权限组,双击权限组,查看计划模板,建议选择全天有效

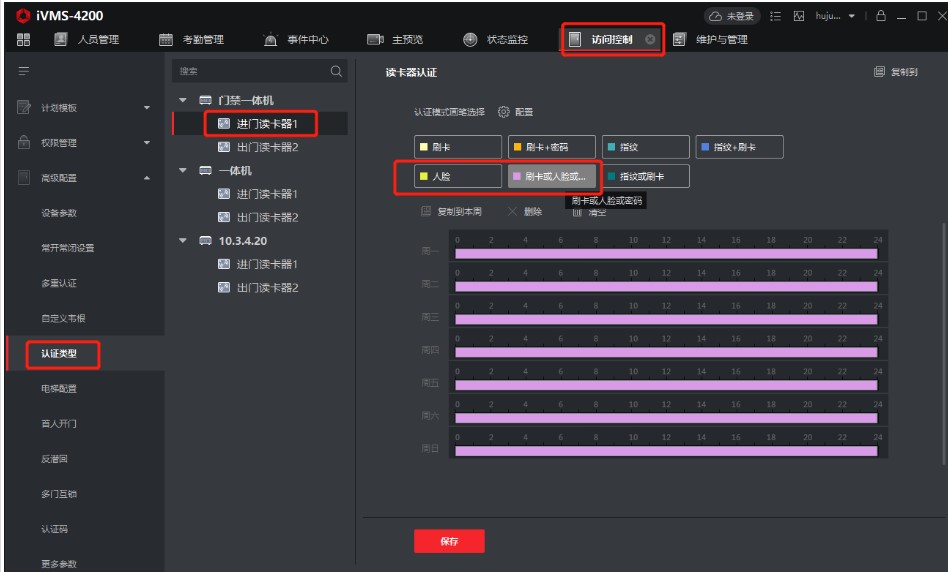
3、访问控制-高级配置-认证类型,选择门禁设备下的读卡器,检查刷脸的时间,是否在对应认证类型的时间范围内

注:如果门禁设备人脸识别慢、提示人脸被锁定也可以使用如下方法排查
(1)如果室外使用,请在一体机本地菜单-环境,选择【其他】;
关闭【真人检测】和【环保模式】功能后再测试
(2)4200客户端关闭流程
点击远程配置-智能配置-智能配置,取消真人检测,保存

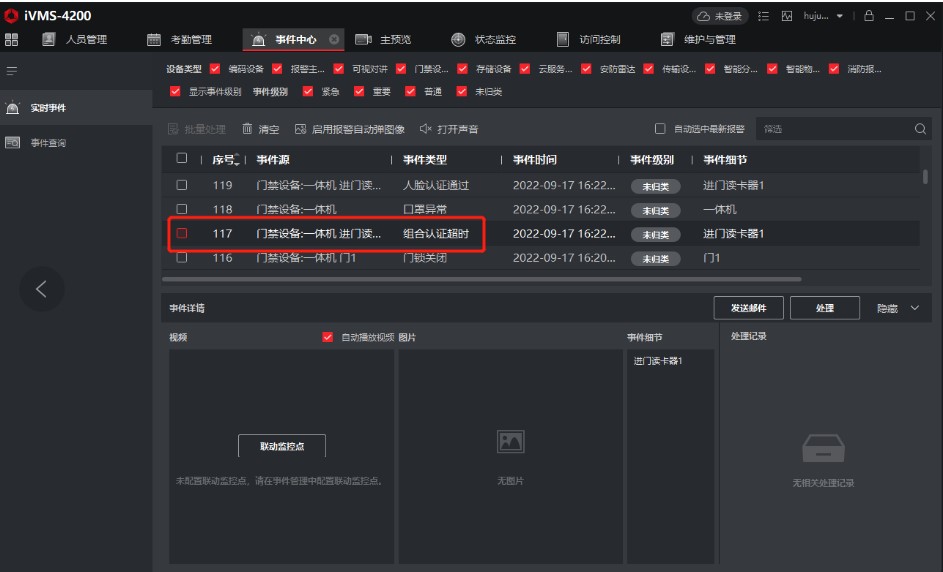
(1)请先确认刷脸后设备上的提示的报错信息
(2)检查人员信息,确认人脸是否有权限以及设备的验证方式是否是“或人脸或仅人脸的方式”
操作方法:
在ivms4200客户端 中,依次点击:访问控制-认证类型,找到对应一体机选择读卡器,核对认证方式
如4200认证方式无误,则网页访问一体机,查看对应人员是否开启了自定义认证方式:
人员管理-双击对应人员,查看认证配置,改成同设备或者正确的认证方式

1、检查门锁接线是否正确,请参阅:
海康威视常用门禁一体机接线指导
2、万用表打到蜂鸣档测试一体机的NC与COM,或者NO与COM通断变化是否正常。
请按如下流程排查:

▷1个抓拍机控制2个道闸接线:
(1)2个道闸的开和开接起来,公共和公共接起来
(2)抓拍机1A和1B分别接入其中一个道闸的开和公共
▷ 2个抓拍机控制1个道闸接线:
(1)抓拍机的1A和1A接起来,1B和1B接起来。
(2)然后将接好的1A和1B接入道闸的开和公共
▷ 多个抓拍机控制多个道闸接线:
(1)多个抓拍机的1A和1A接起来,1B和1B接起来。
(2)多个道闸的开和开接起来,公共和公共接起来。
(3)然后将其中一个抓拍机的1A和1B接其中一个道闸的开和公共
抓拍机与道闸的详细接线说明请参阅:
海康威视常见抓拍机和道闸的接线方法
1、排查流程
1) 现场构架梳理
2) 报警主机排查(增加主机直连测试、设备地址不能重复)
3) 编程排查
4) 线路问题排查
2、操作步骤
1) 报警主机
升级路径:/产品资料/01.股份公司/10.报警门禁对讲产品/00-基线程序(升级程序+客户端+SDK+用户手册)/01-报警/09-电子围栏脉冲主机(DS-PF 系列)/KP40/1.程序/硬件初始化操作:
a. 将网络报警主机断电,并打开盖子;用短路帽或者连接线将网络报警主机上的复位
开关短接。
b. 给网络报警主机上电,2 秒后请断电;移除复位开关上的短路帽或者连接线。
c. 给网络报警主机盖好盖子;重新给网络报警主机上电。
2) 地址设置
RS485 通讯以地址区分设备,设备地址不能冲突,冲突会导致设备离线等问题。脉
冲主机通过拨码的方式设置地址,从 1 开始设置,设置地址之后重启生效。
3) 编程排查
KP40 编程如下:
在 KP40 主机键盘上进行编程操作
a. 进入编程模式:012345*0#
b. 设备数设置:816XX#(默认值 81605#)
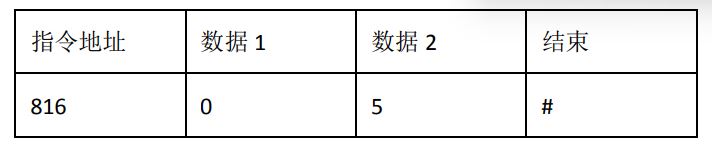
注:XX 指脉冲主机实际数量,单防区主机范围 1~40;双防区主机 1~20。如 5 个脉冲主机输入 81605#,需重新注册脉冲主机时,可使用此指令。
c. 波特率参数设置:817XX#(默认值 81701#),排查问题时调整此参数
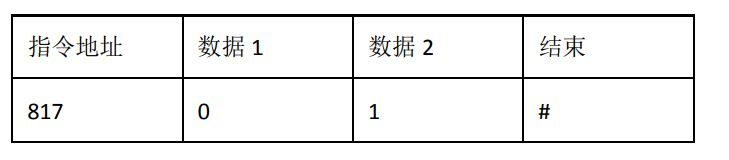
注:设置波特率参数,默认是 01 即波特率 19200;00 即波特率 9600。
d. *#退出编程,
波特率设置及说明如下:
协议切换流程
海康电子围栏主机蓝板子(颜色)分两种版本(旧版本不支持单双防区混接功能)新版本支持单双防混接,新版本协议切换步骤如下:
按住主机下键,按住五秒不放,直到听见主机滴的响一声则切换波特率到9600,然后主机断电重启,即为协议切换成功
按住主机上键,按住五秒不放,直到听见主机滴的响一声则切换波特率到19200,然后主机断电重启,即为协议切换成功
注意事项:
(1)119200波特率是新版本程序支持单双防主机混接,9600波特率为老版本程序,不支持单双防区主机混接。
(2)切换协议之后必须断电重启后才能生效。
(3)现场如发现蓝板子主机可以采取以上方法去测试主机程序的版本,如不能切换就是老程序,如需要支持单双防区混接。需更将主机升级程序方能实现单双防区主机在同一个项目中混接。升级程序,需要用J-LINK烧写工具将程序重新写入主机中。
(4)红板子(颜色)已经全部支持单双防区混接功能,出厂默认波特率为19200。
4) 直连测试
将脉冲主机的 485 和 KP40 主机的 D+ D-直接进行相连。直连测试时,需要对编程命令进行来回切换,记录通讯异常时的编程命令,最终选择一个波特率作为全部设备使用的波特率。
5) 线路问题排查
a. 普通 485 线路
485 总线长度之和不得超过 800 米,正确的接线方式如下:
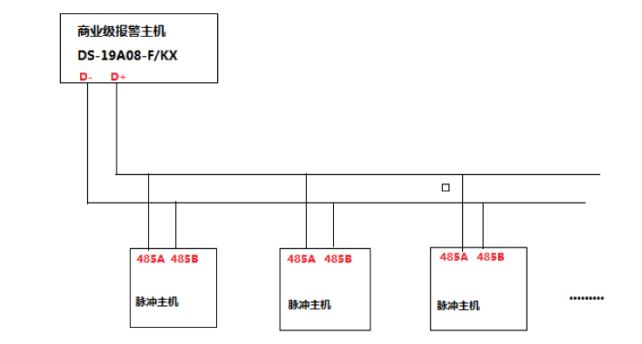
当 485 总线距离比较长时,在通讯线末端设备 485AB 之间加 120 欧姆的终端电阻用
于抑制干扰,如下图:

如果增加电阻无效(强电干扰严重),单独重新拉一组线进行测试,如果单独拉线
正常可以判断现场线路异常,需要整改。
b. 光端机线路(以 DS-PF-485R 为例)
正确的光端机(光端机需区别发送端和接收端)布线示意图如下
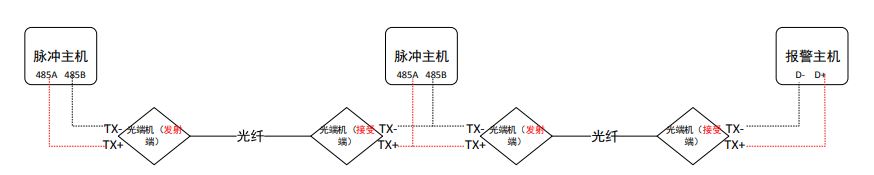
光路测试,现场需用专门的仪器测试光纤是都通畅无损,光学允许最大链损:10 dB;
中继器的指示灯说明
Power: 供电正常
RXD:数据信号接受灯,该灯闪亮表示已经收到数据信号
TXD:数据信号发射灯,该灯闪亮表示数据信号已经发出

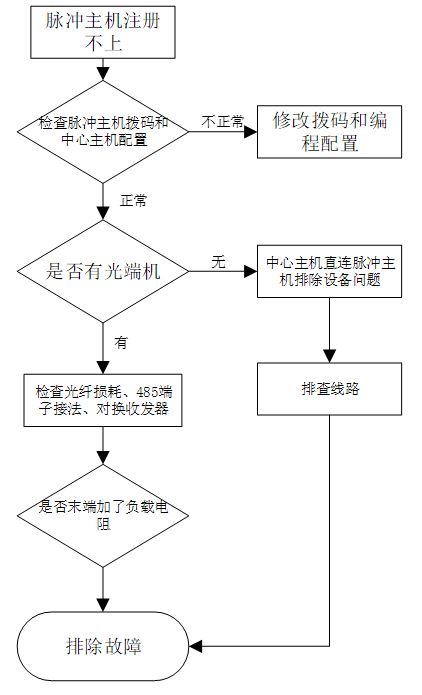
①检查中心主机编程和脉冲主机的地址拨码。
②中心控制主机直连离线的脉冲主机,或者采用对换法测试是主机问题还是 线路问题。
③使用光线传输时末端脉冲主机处要加负载电阻(脉冲主机自带)。
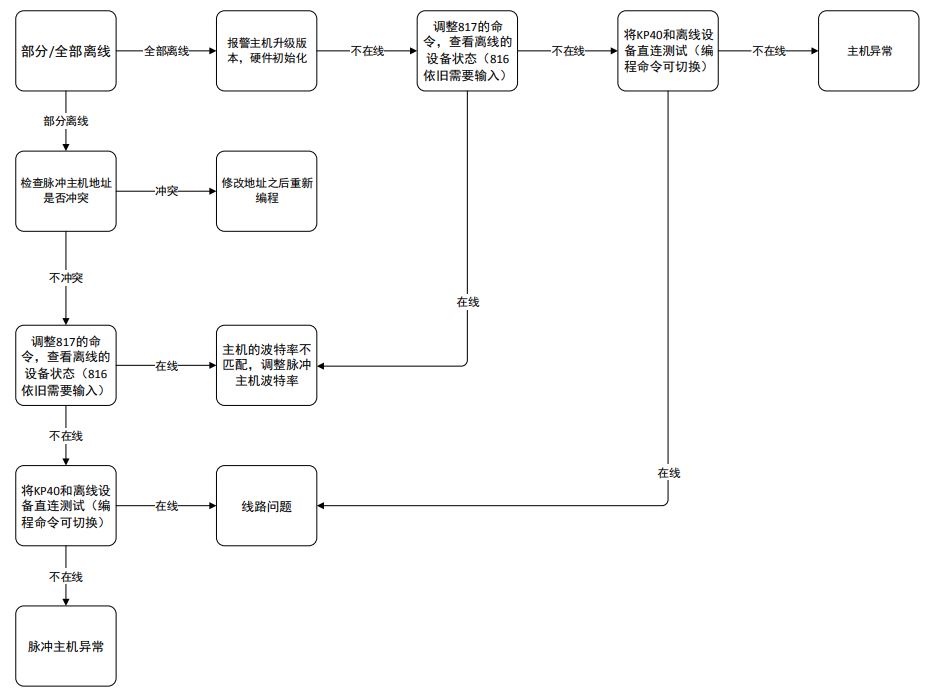
排查流程如下图:
可能原因:
主机本身故障或者前端合金线有短路、开路或者对地短路等情况。
故障排查:
①去掉合金线,按照标签示意图接上导线,布防后还报警即为主机故障。
②脉冲主机断电,使用万用表逐段排查合金线。