调节弹簧
警告:调节弹簧时设备请勿上电。
根据闸杆的平衡状态,调节平衡弹簧的松紧程度,使得闸杆起杆、落杆平稳。
说明:
• 默认出厂前道闸已完成平衡调节,使用时如有不当还可以进一步调整。
• 闸杆放置于 45°时保持平衡即为最佳状态。
若闸杆落下,说明弹簧力度小,需调紧弹簧。
若闸杆抬起,说明弹簧力度大,需调松弹簧。
连接线缆
说明:道闸出厂时已经完成内部布线。安装时只需连接空气开关线和相机开闸线。
1. 空气开关接线
根据实际情况从空气开关上方接入火线、零线并接入地线。
2. 相机开闸线接线
将开闸信号线一端接至道闸控制器线控接口“COM”和“▲”,另一端接至相机尾端起闸输出端口“O1﹢”和“O1﹣”。
3. (可选)道闸联机
两台道闸对开使用时,需使用 RS485 联机或线控联机方式,也可两种联机方式同时使用。(请参见 7.1.2 菜单设置说明>3 功能解释>4.RS485 地址进行操
作)。
上电学习
设备上电后闸杆会自动进行位置学习,默认先慢速开闸一次再慢速关闸一次。上电学习状态可以通过控制器上的数码管显示区查看。
注意:遇到如下情况需重新上电学习(即重启设备):
• 学习过程中同时监测各开闸及防砸信号端口,若有信号则道闸停止学习,且在数码管上显示相关信号信息。等信号消失后需重新上电学习。
• 学习过程中闸杆遇到障碍不能开闸到 90°或出现不能正常关闸的情况时,需重新上电学习。
• 学习完毕后,数码管提示“位置学习失败”,需移除障碍或调整弹簧后重新上电学习。
调节限位
通过控制器菜单面板调节闸杆限位,使得落杆状态水平、起杆状态垂直
1. 开到位或关到位状态下,长按![]()
2. 按![]()
![]()
![]()
3. 按![]()
![]()
![]()
说明:
限位调节选项说明:
• ②为水平调整:可调落杆的水平程度,数值小翘起,反之下垂。
• ③为垂直调整:可调起杆的垂直程度,数值小前倾,反之后仰。
4. 按 ![]()
![]()
5. 按![]()




时控定时
通过时控开关设置定时,控制道闸自动开启和关闭广告投放。
时控开关安装于道闸箱体内部,操作面板如下图所示:
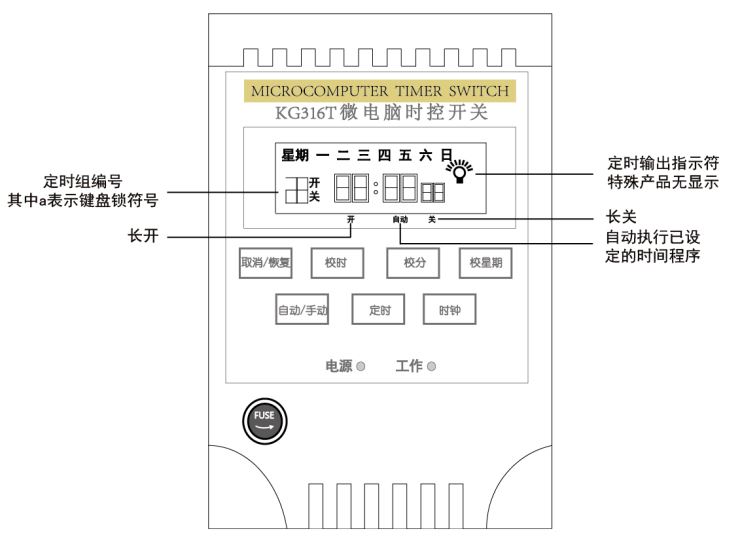

一、操作前准备
1. 检查键盘是否上锁。如上锁,按<取消>键 3s 以上解锁。
2. 检查时钟显示是否与当前时间一致,如不一致请重新校准。
校准时钟步骤:按<时钟>键的同时,分别按住<校星期>、<校时>、<校分>键,可校准对应时间。
二、设置定时
1. 设置定时开时间。
按<定时>键,显示屏左下方显示“1 开”,表示第一次开启时间。按住<校星期>、<校时>、<校分>键分别此次定时开的时间。
2. 设置定时关时间。
按<定时>键,显示屏左下方显示“1 关”,表示第一次关闭时间。按住<校星期>、<校时>、<校分>键分别设定此次定时关的时间。
3. 依次设置多组定时开关时间。
参考 1、2 步骤多次设置定时开关时间,最多可设置 10 组。
注意:
如果需要取消某组定时开关,请按<取消/恢复>键清除该组时间。清除时间后显示屏显示“——:——”,而不是“00:00”。
4. 确认定时设置正确。
定时设置完成后,请按<定时>键检查各组定时设置情况是否与实际情况一致。
若不一致,请调整或重新设置。
检查无误后,按<时钟>键,退出至显示屏界面。
5. 启用定时设置。
按<自动/手动>键将显示屏下方符号调至“自动”。设置完成后时控开关将根据所设定的时间自动开、关电路。
说明:
如使用过程中只需要临时开、关电路,则按<自动/手动>键将显示屏下方符号调至“开”或者“关”。
6. 按<取消>键 3s 以上锁定键盘。
菜单设置说明
1、常规菜单
在闸杆开到位或关到位状态长按 ![]()
常规参数设置。设置菜单说明如下
2、高级菜单
在闸杆开到位或关到位状态长按![]()
高级参数设置。设置菜单说明如下
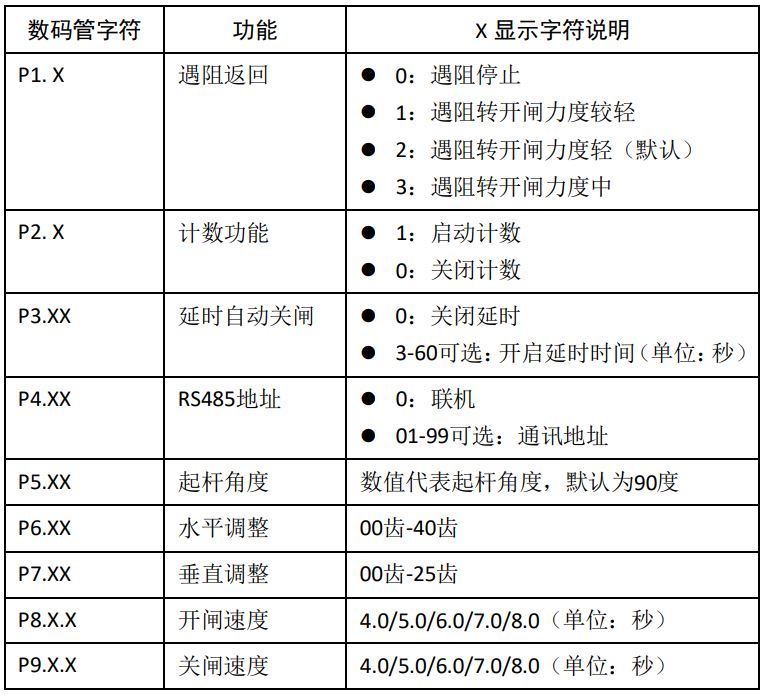
3、功能说明
1. 遇阻返回:落杆过程中遇障碍物时自动转起杆。
2. 计数功能:记录线控开闸 N 次数,N 辆车压过地感后自动落杆。
3. 延时自动关闸:起杆到位后,在设定时间内没有车辆压过地感通行时,将自动落杆,延时中有开闸信号重新计数;有关闸信号则立即关闸。
4. RS485 地址:两台道闸对开使用时,可把主机设置为“联机”模式。当使用上位机(如电脑)控制时,可设置选择数字 01-99 地址通讯。
控制器支持 RS485 联机和线控联机两种方式。说明如下。
(1) RS485 联机:把连接系统开闸信号和地感信号的控制器称为主机,在[设置菜单>P4.XX]设置为 P4.0。将另一台从机的控制器的 RS485地址设置为 P4.1。用导线(建议用双绞线)把主机和从机 RS485 接口的 D+和 D-一一对应接在一起即可。该联机方式仅需 2 根导线。
(2) 线控联机:把两控制器线控接口的“公共、开闸信号、关闸信号、地感信号、停止信号”用导线并在一起,至少需 4 根导线。如事先预埋导线数量不够,可把不常用的停止信号忽略。


注:在要求较高的场合,可同时使用 2 种联机方式。此外,两台道闸的遥控接收
器也可以编码一致,以提高遥控同步一致性。
5. 起杆角度:起杆到位的角度。若垂直有障碍物挡杆可设角度。
说明:
若设置非 90°时,上电学习方式则不能设为仅开闸。
6. 水平调整:可以微调闸杆起杆垂直,数值小翘起,反之下垂。
7. 垂直调整:可以微调闸杆起杆垂直,数值小前倾,反之后仰。
8. 开闸速度:设置开闸的速度。
9. 关闸速度:设置关闸的速度。
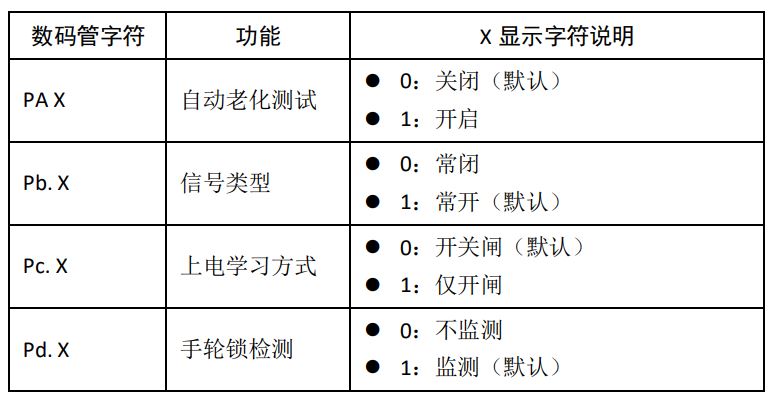
10. 自动老化测试:开启该功能可实现道闸自动开、关闸及关闸过程转开闸老化测试,断电重启后仍继续执行。可通过按停止键来取消该自动老化
测试功能。
11. 信号类型:指线控信号的“停止”、“地感”及“对射”信号输入类型。常开表示信号端与公共端短路时响应动作;常闭表示信号端与公共端断开时响应动作;本控制器默认为信号常开。
12. 上电学习方式:道闸上电时默认慢速开、关闸一次。若配带较长的栅栏杆时,可能因闸杆变形慢速关闸时闸杆压地面而无法顺利关闸,此时可把上电学习方式设置为 1 仅开闸。
13. 手轮锁监测:监控器会实时监测手轮锁状态,若监测传感器失效,解锁状态仍提示 Er.6 错误信息,此时可以将该项设置为 0 关闭手轮锁监测功能,让道闸临时恢复正常工作。
14. 车队通行功能:在需要车队连续通行时,可开启车队模式。
操作步骤如下:
在开到位状态下按一下![]()
![]()
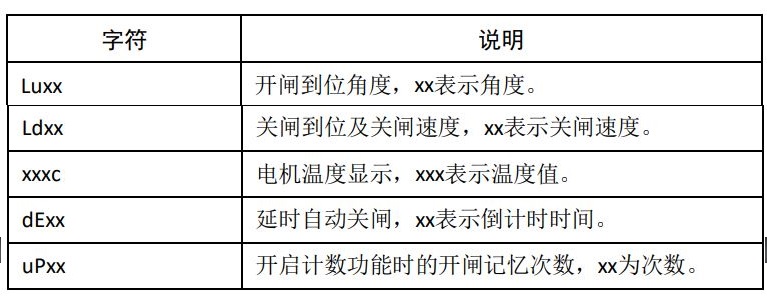
数码管显示字符说明
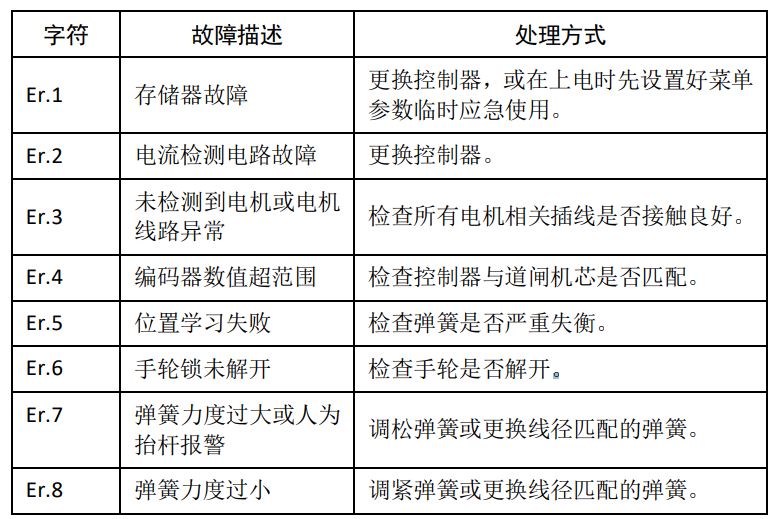
故障信息描述
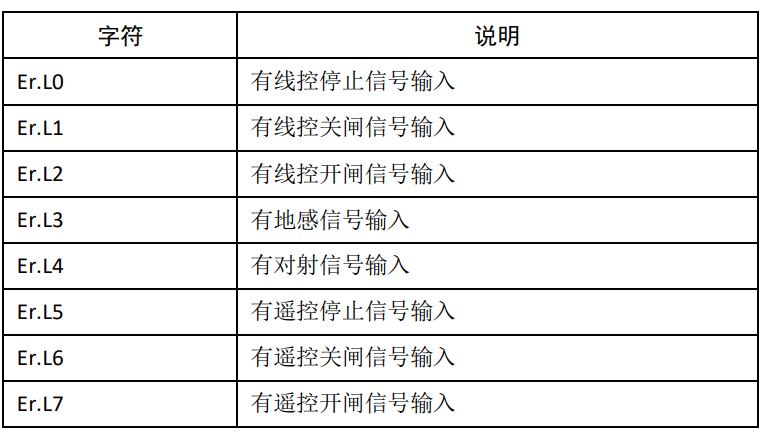
上电提示输入信号信息描述
限位状态显示描述
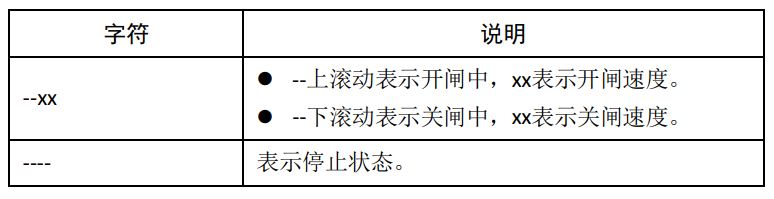
开/关闸过程显示描述
遇阻返回提示





