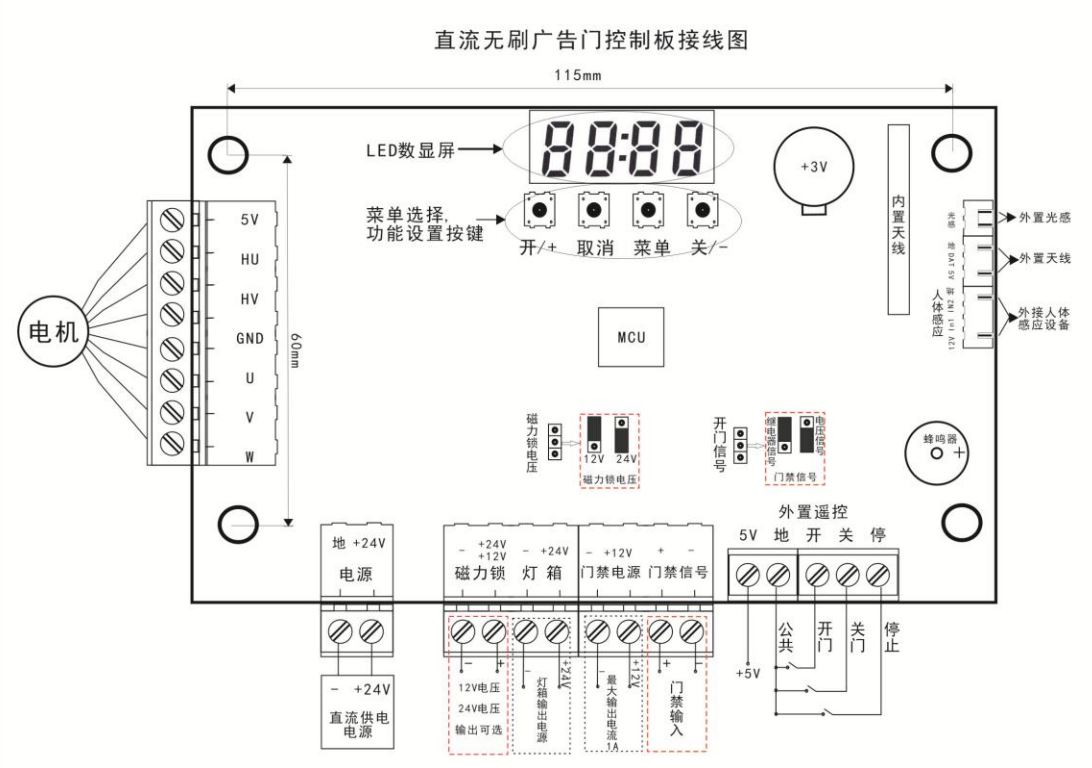
广告门控制板接线图

参数设置
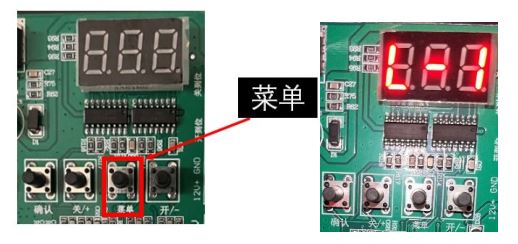
可以通过长按“菜单”按键 3 秒进入参数设置状态,LED 将显示“F-XX”。通过按短按或者长按“开/+”、“关/-”两个按钮选择菜单项,短按一次增加或者减少一个项,长按则连续加减。再次按“菜单”键进入指定项的设置,“取消”键退出设置。当对指定参数设置完成以后,必须按“菜单”键确认才能生效。按“取消”键设置的参数不会生效。60 秒内没有按键,控制板上的蜂鸣器将长鸣一声,退出设置状态,返回正常的工作状态。


所有涉及到角度的地方,关门位置为 0 度。
命令详解:
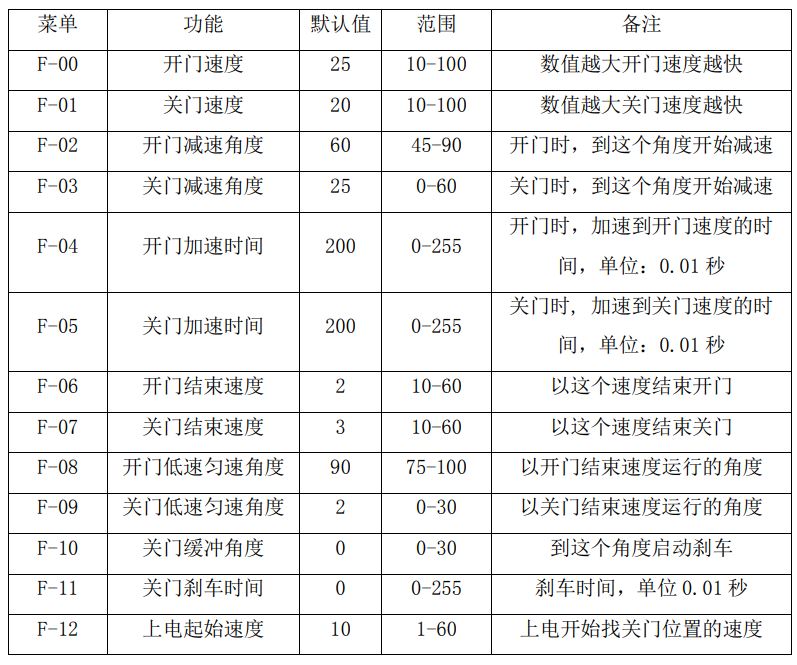
F-00 开门速度
数值越大开门速度越快。文中所涉及到的速度都是以全速的百分比,如全速为 100,
则 20 表示为全速的 20%。按“菜单”键进入设置状态显示的是当前正在使用的速度。
可根据实际的环境选择开门速度,设置完成后立即生效。城邦电机默认值:50。
F-01 关门速度
同开门速度。城邦电机默认值:50。
F-02 开门减速角度
开门时,开到这个位置开始减速。
F-03 关门减速角度
关门时,关到这个角度开始减速。
F-04 开门加速时间
单位:0.01 秒,开门时,加速到开门速度所需要的时间。数值越小,加速越快。
F-05 关门加速时间
单位:0.01 秒,关门时,加速到关门速度所需要的时间。数值越小,加速越快。
F-06 开门结束速度
以该速度结束开门。数值越大速度越快。速度快了可能导致开门结束的时候门晃动,
这时可减小该值。城邦电机默认值:10。
F-07 关门结束速度
以该速度结束关门。数值越大速度越快。速度过快可能导致关门过程中撞门,这时可
减小该值。如关不上门则需要加大该值。城邦电机默认值:6。
F-08 开门低速匀速角度
该参数在开门即将结束时设置一个低速的匀速区。开门过程中,到这个角度后就以 F06 开门结束速度运行,直到完成开门。如果该参数设置为大于等于 90 或者设置为小于 F-02 开门减速角度所定义的角度,则这个功能无效。
F-09 关门低速运行角度
该参数在关门即将结束时设置一个低速的匀速区。关门过程中,到这个角度后就以 F07 关门结束速度运行,直到完成关门。如果该参数设置为 0 或者设置为大于于 F-03关门减速角度所定义的角度,则这个功能无效。
F-10 关门缓冲起始位置
从这个位置开始以关门结束速度关门。如果关门震动大,需要减小该值。如果为 0 则
不刹车。
F-11 关门刹车时间
关门时刹车时间,单位:0.01 秒,在关门缓冲起始位置设置一个刹车点。如果关门停
止速度和关门缓冲起始位置都调节到了极限值还是关门震动大。这种情况一般是门惯
性较大,可以设置一个刹车时间,默认为 0 即不刹车。
F-12 找关门位置的速度
控制板上电后,需要以一个速度寻找原点位置,如果上电后的速度过大或者过小,可
以通过该参数设置。数字越大速度越高。城邦电机默认值:20。
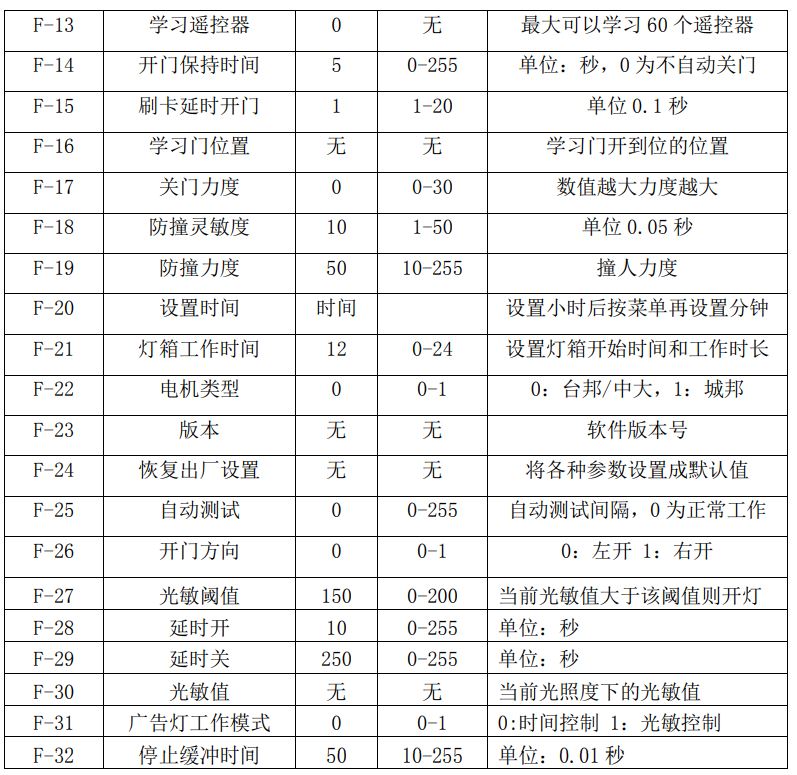
F-13 遥控器学习
进入遥控器学习菜单项后显示的是当前学习到的遥控器的数量。按照开->关->停的顺
序学习。为了保证学习的可靠性,每个按键需要长按一秒,每学习完一个按键,蜂鸣
器会鸣叫一声。三个按键学习完成后蜂鸣器长鸣一声,表示一个遥控器学习正确。同
时 LED 显示学习到的遥控器数量加一。学习完一个遥控器后可以继续学习下一个。如
果是学习过的遥控器,则蜂鸣器连续急促鸣叫三声,提示这个遥控器是已经学习过的。
如果 20 秒内没有遥控器按键,蜂鸣器将长鸣一声,退出学习状态,进入正常工作状态。
学习成功的遥控器在正常工作状态下按键会有蜂鸣器鸣叫。
F-14 开门保持时间
范围 0-255,单位 1 秒,默认 5。门开启后停留指定时间自动关门。如果为 0 则不自动关门。
F-15 刷卡延时开门
范围 1-20,单位:0.1 秒,默认 1。等待磁力锁释放的时间。
F-16 学习门的位置
进入该菜单选项前必须保证门处于关门状态。进入该菜单后可以使用手动方式调节门
的到合适的位置位置,也可以按控制板上的“开/+”、“关/-”按钮调节门的位置。
调节好门的位置后,按“菜单”按键保存门的位置。如果门的开门角度过小,蜂鸣器
将会鸣叫 3 声,同时 LED 显示“E-01”错误信息。表示学习失败,要重新学习,必须
重新开始前面的步骤。
F-17 关门力度
范围 0-30,默认:0。该参数主要作用是门关到位后再次确认关闭。保证磁力锁能够
锁住。
0:门即将关到位将提前打开磁力锁,这种情况会出现关门撞击声音较大,优点是门
不会反弹。
大于 0:门到位以后才打开磁力锁,这种情况关门声音比较小。门锁上以后会二次
确认关门。数值越大,二次确认关门的力越大。门锁不上可以加大该值。
F-18 防撞灵敏度
范围:1-50,默认:5。单位:0.05 秒。从撞人到反应的最小时间。数值越小灵敏
度越高,灵敏度越高越容易收到干扰。如果正常开关门过程中出现门停顿则需要加大
该值。
F-19 防撞力度
范围 10-255,默认值:30。速度越高,则需要加大该值,所以如果更改了开门或
者关门的速度,则需要同步的修改该参数。该值和 F-18 防撞灵敏度共同确定是否撞人。
一个确定撞人的力度,一个确定反应时间。
F-20 设置时间
进入设置时间菜单项以后,小时数闪烁,使用“开/+”、“关/-”调节小时数,设
置完成后按“菜单”键切换到分钟的设置。都设置好以后按“菜单”键确认。长按
“开/+”、“关/-”可以快速加减设置值。
F-21 灯箱工作时间
与设置时间类似,先设置灯箱的开启时间,再设置开启时长。
F-22 电机类型
范围:0-1,默认:0。0:中大、台邦。1:城邦。
F-23 软件版本
软件版本号。
F-24 恢复出厂设置
该选项有两个功能,清除遥控器和恢复出厂设置。为了防止误操作,需要设置特定
的值后在按“菜单”键才能启动操作。进入 F-24 菜单项显示为 0。需要设置规定的值
来执行不同的操作:
A、 F-24 设置成 5:清除遥控器
B、 F-24 设置成 10:恢复出厂设置,将设定值恢复到默认值,同时清除遥控器。
操作完成后蜂鸣器长鸣一声表示成功,如果失败则蜂鸣器鸣叫三声,同时 LED 显示
“E-00”表示设置失败。原因就是设置值不是 5 和 10。
控制板的默认参数可以满足绝大多数场景,如果在设置过程中出现设置不当。可以
使用恢复出厂设置功能。
F-25 自动测试
范围:0-255,默认:0。自动测试的时间间隔,单位:秒。为 0 表示关闭自动测试。
用于门的自动测试,可以用于老化测试。该参数断电保存,所以自动测试完成以后需
要将该值设置为 0 来恢复正常工作状态。
F-26 开门方向
取值范围:0-1,默认:0。0 为左开门,1 为右开门。
F-27 光敏阈值
默认:150,设定开启灯的光敏值。当前的光敏值可以通过 F-30 查看。当前的光敏
值超过设定的光敏阈值。则打开灯。因为安装环境不同、壳体透光度差异、客户要求
开灯的亮度要求不同,所以光敏阈值不能有一个比较折中的值。需要安装后根据要求
调节阈值实现。
F-28 延时开
范围 0-255,默认:10,单位:秒。检测到当前光敏值超过 F-27 命令设置的光敏
阈值后再延时设定的延时时间后再开灯。
F-29 延时关
范围 0-255,默认:250,单位:秒。检测到当前光敏值低于 F-27 命令设置的光敏
阈值后再延时设定的延时时间后再关灯,防止车灯照射等情况下误动作。
F-30 当前光敏值
当前光照度下的光敏值。可以作为设置开关灯阈值的参考。该命令不会超时退出,
必须按“停止/取消”按键退出显示,否则将一直显示。
F-31 广告灯工作模式
默认:0,0:时间控制 1:光敏控制。为 0 时由时间控制灯的开关,时间到了设定
的开灯时间则打开灯。为 1 时由光敏控制灯的开关。天色变暗到设定的光敏值后打开
开关。
F-32 停止缓冲时间
范围:10-255,默认:50,单位:0.01 秒。在开门或者关门过程中,从按停止按
钮开始到门完全停止的时间。
人体红外感应:板上的人体红外感应可以外接红外感应器。当红外感应器检测到人
时,将输出有效信号。广告门板有两个人体感应接口:
IN1:检测到人后门开到位,感应信号有效则一直保持开门状态。感应信号消失后,
等待开门保持时间后自动关门。
IN2:检测到人后门开到位,感应信号有效则一直保持开门状态。感应信号消失后,
立即关门。
注:
A、 在正常工作模式下长按“开/+”按键可以快速进入遥控器学习菜单命令。
B、 在正常工作模式下长按“取消”按键可以快速进入时间设置菜单命令。