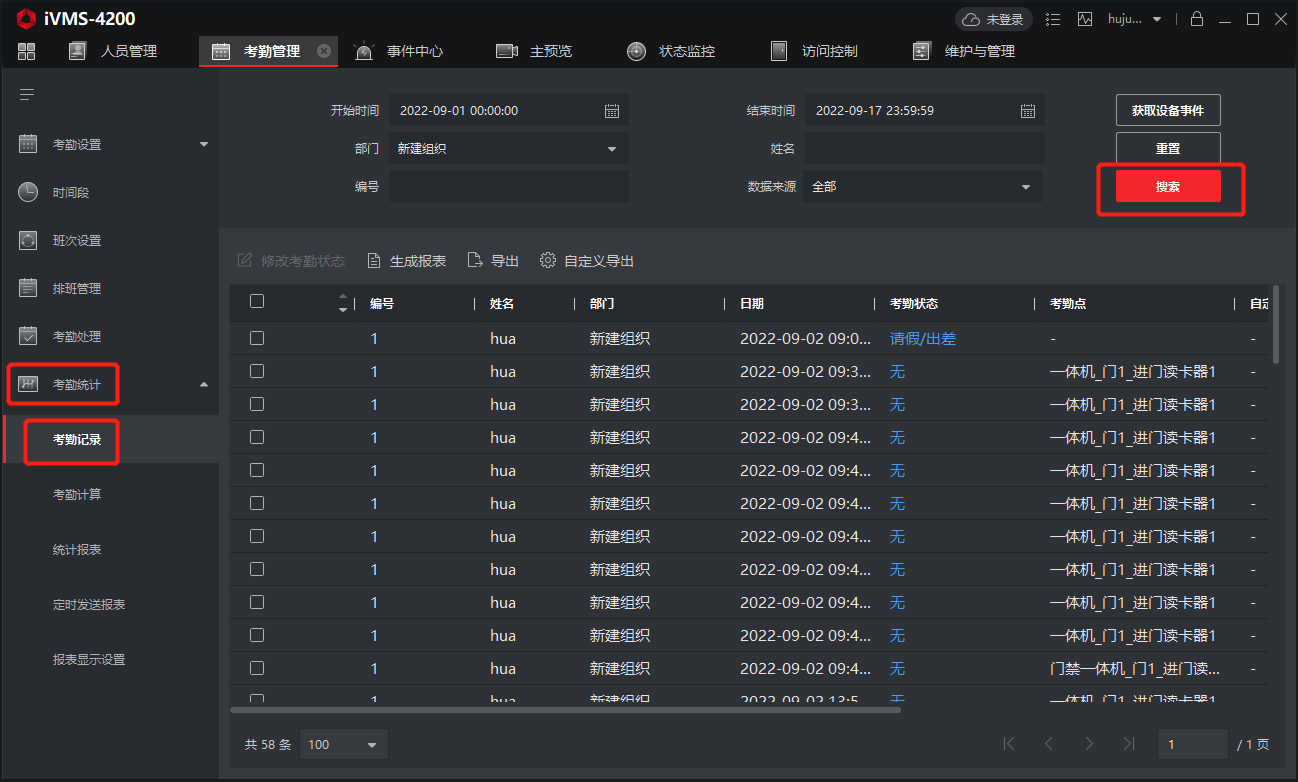
【问题现象】在考勤记录,获取设备事件提示为同步到新数据,如下图所示:

【原因分析】未同步到新数据指的是您当前选择的门禁设备,本地的信息和4200客户端的信息是一样的;
【处理思路】
①核对4200对设备是否已布防?

②检查设备时间确保准确?
③维护与管理—事件中心-确保成功获取设备事件
④确保设备被设置为“门禁点”
⑤考勤管理-考勤设置-基本规则-认证类型确保选择”全部“(此步骤容易被忽视)

⑥ 直接点击搜索即可,然后再去考勤计算,选择对应的时间计算

【问题现象】在考勤记录,获取设备事件提示为同步到新数据,如下图所示:
【原因分析】未同步到新数据指的是您当前选择的门禁设备,本地的信息和4200客户端的信息是一样的;
【处理思路】
①核对4200对设备是否已布防?
②检查设备时间确保准确?
③维护与管理—事件中心-确保成功获取设备事件
④确保设备被设置为“门禁点”
⑤考勤管理-考勤设置-基本规则-认证类型确保选择”全部“(此步骤容易被忽视)
⑥ 直接点击搜索即可,然后再去考勤计算,选择对应的时间计算
1、4200客户端-维护与管理,检查设备是否在线,并且检查布放状态:右上角工具,设备布放控制
若设备显示未布放,则检查是否有其他电脑同时添加/访问这台设备,建议您可以选择全部布放测试,布放失败则建议您直连门禁设备,修改ip重新布放测试

2、布放成功后,选择对应设备,点击获取设备事件,选择对应的事件,获取成功后再进行考勤统计


3、考勤统计:点击考勤记录,选择对应的时间,搜索,然后进入考勤计算,重新计算

通常为考勤配置问题
注:如果不定时出现所有人员半天或者一天考勤异常
则可能由于设备离线或者网络问题导致数据同步不完整造成
1、核实设备是否在线,若离线,建议重新添加
2、正常在线后,重新同步数据,计算考勤。
可以重新设置下考勤,请参阅:海康威视ivms4200客户端考勤配置教程
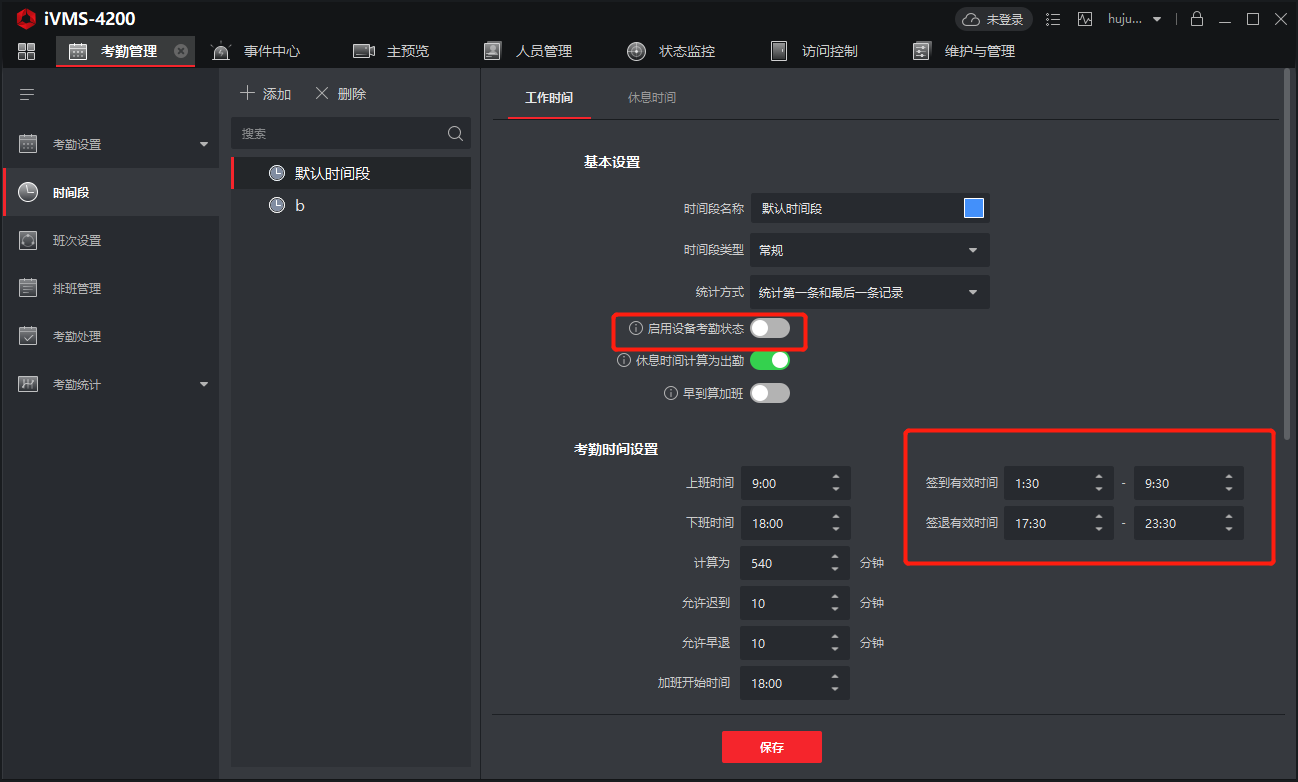
1、检查时间段设置:取消设备考勤状态
刷卡时间是否在有效签到签退时间内,建议把有效时间设置长一点
2、检查班次设置:考勤异常那一天有没有排班
3、检查排班管理:排班有没有生效,是不是有重复排班的情况,建议您删除不要的班次,一个人对应有个排班
注:门禁设备在开启“仅测温模式”的时候是不支持考勤的。
【问题现象】
人员一直都正常刷卡上下班,但是考勤信息部分人没有考勤明细,4200上也查不到考勤记录。
【处理思路】
1、检查设备时间与客户端是否同步
打开iVMS-4200客户端,点击右上角三横杠图标,选择工具-批量校时对门禁点进行校时
2、核实客户端人员信息和设备端人员信息是否匹配
常见于设备本地录入的人员,客户端上手动录入的人员信息,姓名和卡号是对的,但是人员编号不一致。注意:4200客户端存在人员编号规则设置,例如4200客户端编号为00001,下发到设备之后,部分设备会自动清除前面的0,设备上的编号变为1,导致人员编号不一致引起无法获取到考勤数据。
3、核对考勤配置是否正确
1)考勤管理—考勤设置界面,检查是否设置考勤计算时间和是否设置认证类型;
2)在考勤点设置里面查看是否有设置门禁点设置为考勤点,员工是否是在考勤点认证考勤,比如刷卡;
3)最后,核对时间段设置、班次设置,检查是否正确设置排班。
请参阅:海康威视ivms4200客户端考勤配置教程
4、查看是否有原始考勤记录
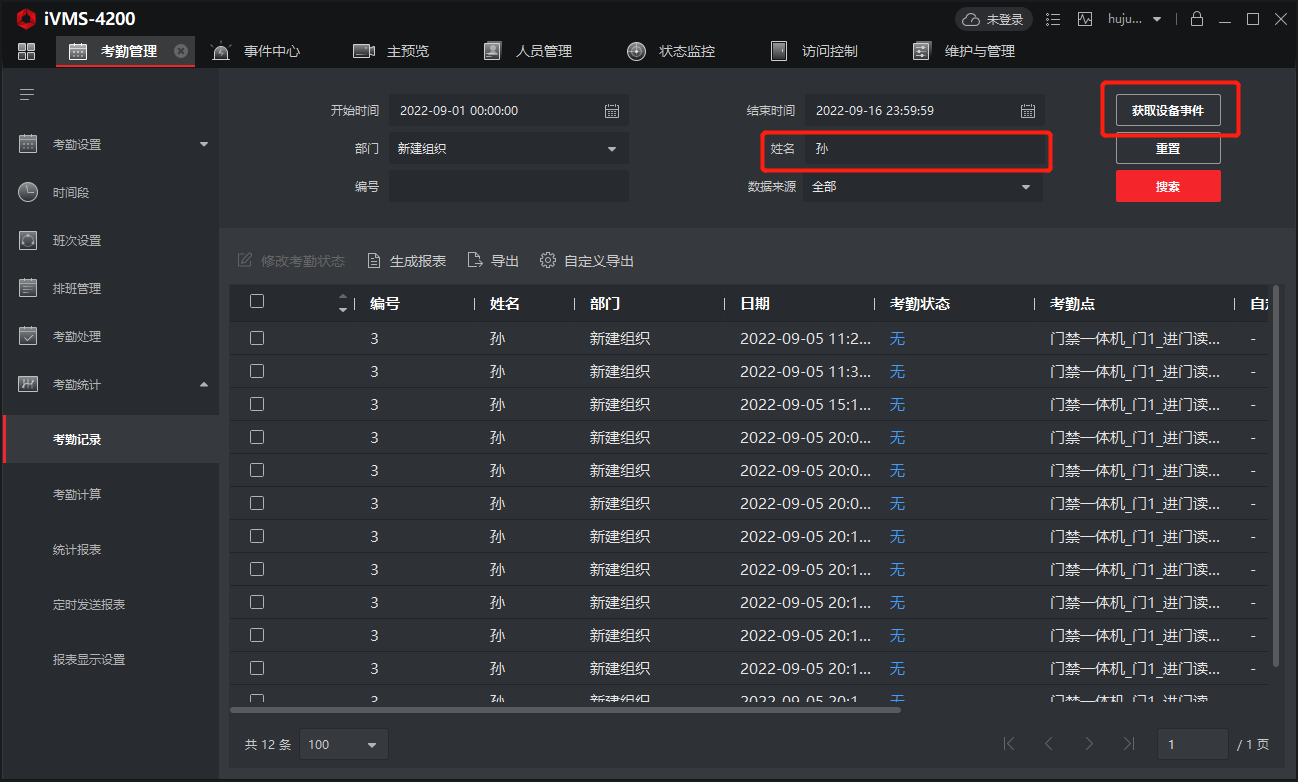
考勤管理-考勤统计-考勤记录界面,选择对应的时间和部门,重新获取设备事件,提示获取成功或者未同步到新数据后,点击搜索;
如果信息比较多,可以输入缺失考勤人员姓名,单独搜索
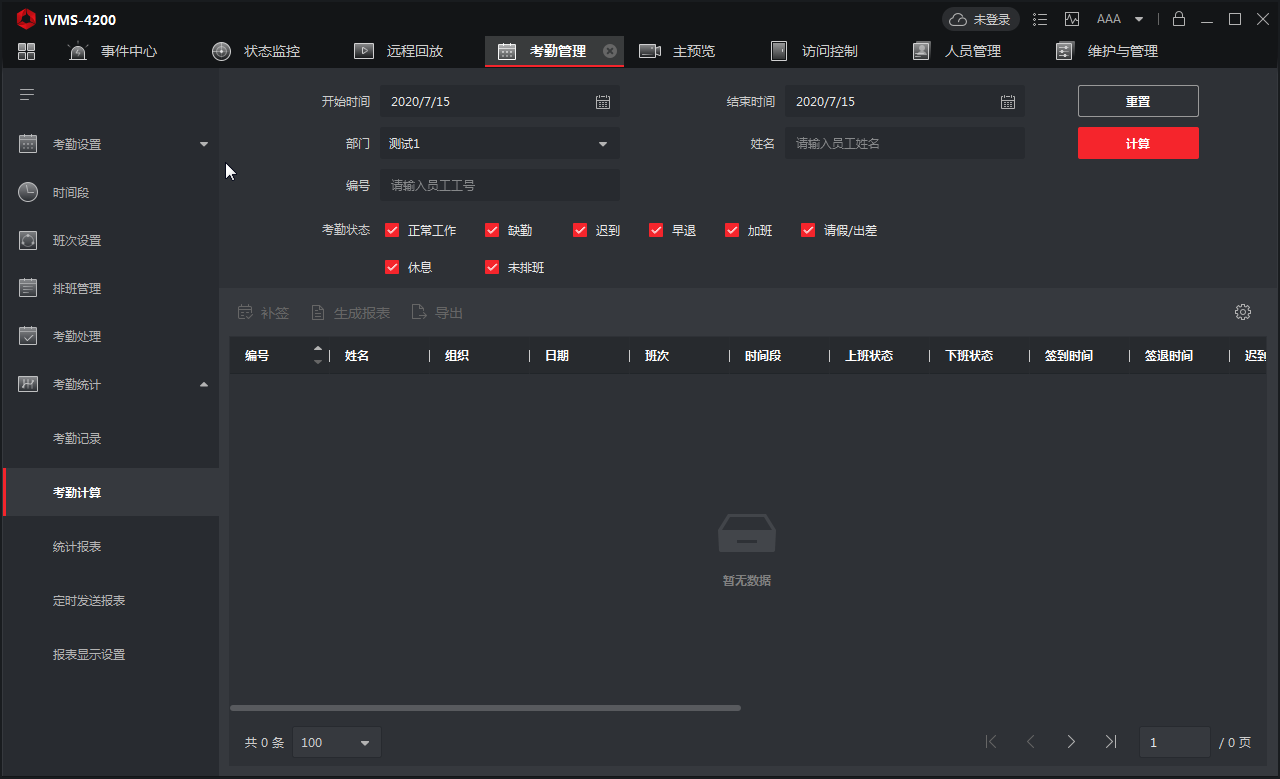
5、可手动计算考勤:
考勤管理-考勤统计-考勤计算,选择对应的时间段,点击计算,查看考勤数据。
6、检查4200相关设置:
1)检查4200客户端安装路径盘是否已满?或者相关文件夹是否为只读模式,修改模式后测试。
2)删除4200客户端安装目录中userdate文件内的Attendance.S重新获取事件。
10 ————PEI核心启动
11 ———— CPU Pre-memory初始化启动
15 ———— 北桥Pre-memory初始化启动
19 ————南桥Pre-memory初始化启动
2B ———— 内存初始化,读取SPD数据
2C ———— 内存初始化,检测Memory presence
2D ————内存初始化,编程内存时序信息
2E ————内存初始化,配置内存
2F ————内存初始化(其他)
31 ————内存安装完成
32 ———— CPU post-memory初始化启动
33 ———— CPU post-memory初始化,Cache初始化
34 ————CPU post-memory初始化,应用处理器初始化
35 ———— CPU post-memory初始化,选择BSP
36 ———— CPU post-memory初始化,系统管理模式初始化
37 ————北桥Post-Memory初始化启动
3B ———— 北桥Post-Memory初始化
4F ———— DXE IPL启动
60 ————DXE核心启动
F0 ————固件引起的恢复条件(自动恢复)
F1 ————用户引起的恢复条件(强制恢复)
F2 ————恢复进程启动
F3 ————找到固件恢复图象
F4 ————加载固件恢复图象
E0 ———— S3唤醒启动
E1 ————执行S3启动脚本
E2 ————重新发送影像
E3 ————系统S3待机导向
60 ————DXE内核启动
61 ————NVRAM初始化
62 ————安装南桥运行期
63 ————CPU DXE初始化启动
68 ————PCI HB初始化
69 ————北桥DXE初始化
6A ————北桥DXE SMM初始化启动
70 ————南桥DXE初始化启动
71 ————南桥DXE SMM初始化启动
72 ———— 南桥设备初始化
78 ————南桥DXE初始化
79 ————ACPI模组初始化
90 ————引导设备选择阶段启动
91 ————驱动连接启动
92 ————PCI总线初始化启动
93 ————PCI总线热拔插控制器初始化
94 ————PCI总线列举
95 ————PCI总线请求资源
96 ————PCI总线分配资源
97 ————控制台输出设备连接
98 ————控制台输入设备连接
99 ————高级IO初始化
9A ————USB初始化启动
9B ————USB复位
9C ————USB检测
9D ————USB启用
A0 ————IDE初始化启动
A1 ————IDE复位
A2 ————IDE检测
A3 ————IDE启用
A4 ———— SCSI初始化启动
A5 ————SCSI复位
A6 ————SCSI检测
A7 ————SCSI启用
A8 ————设置校对密码
A9 ————设置开始
AB ————设置输入等待
AD ————准备启动环境
AE ————传统启动环境
AF ————退出启动环境
B0 ———— 虚拟地址图开始
B1 ————虚拟地址图结束
B2 ————传统可选ROM初始化
B3 ————系统复位
B4 ————USB热拔插
B5 ————PCI总线热拔插
B6 ————清理NVRAM
B7 ————配置复位(NVRAM设置复位)
一、线圈混行模式
1、检查触发线圈和逻辑线圈接线是否正确,触发线圈接车检器7,8;逻辑线圈接10,11;输出3,4接到抓拍机IO口;
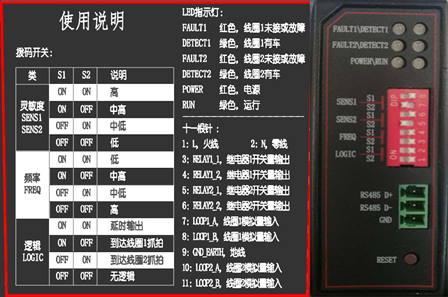
2、检查逻辑拨码是否拨码正确,LOGIC拨码S1 ON S2 OFF(注意S1和S2不是1,2);
3、检查逻辑线圈触发是否正常,车辆压到逻辑线圈查看线圈2的绿灯是否正常亮且稳定(车压在线圈上绿灯一直亮,不会亮灭)
1、需要安装逻辑线圈,方案如下:
2、检查触发线圈和逻辑线圈接线是否正确,触发线圈接车检器7,8;逻辑线圈接10,11;输出3,4接到抓拍机IO口;
3、检查逻辑拨码是否拨码正确,LOGIC拨码S1 ON S2 OFF(注意S1和S2不是1,2);
4、检查逻辑线圈触发是否正常,车辆压到逻辑线圈查看线圈2的绿灯是否正常亮且稳定(车压在线圈上绿灯一直亮,不会亮灭)
二、雷达混行模式
1、需要安装逻辑雷达,方案如下:
2、确认接线无误,触发雷达接入相机IO口的IN1和G,逻辑雷达接入相机ALARM口的IN1和G

3、确认相机上已选择雷达混行模式,正向雷达选择IO1,背向雷达选择IO3
三、视频混行模式
1、相机抓拍参数中开启正向车牌识别
按照规范调试识别区域和轨迹
2、PMS/310终端开启短时间内过滤相同车牌的功能,可配置过滤时间
调试流程:
第一步:调试前准备
1、架设检查
相机调试前请先确定下相机架设是否符合标准
2、接线检查
检查触发信号(车检器,雷达)到抓拍机及抓拍机到道闸之间接线
3、程序检查
请调试前检查相机程序,如果有更新版本,建议先升级程序到最新,以保证相机达到最优状态
4、相机调试
请注意,相机一定要调试,不要安装后不调试,好的识别率需要细致调试
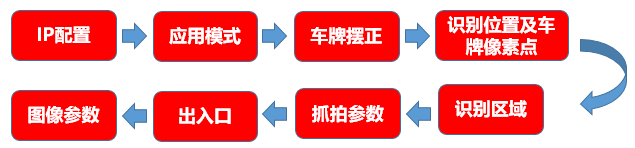
第二步:应用模式选择
一、IP配置 :
官网下载SADP工具,直连设备激活修改IP(密码不要包含特殊字符)
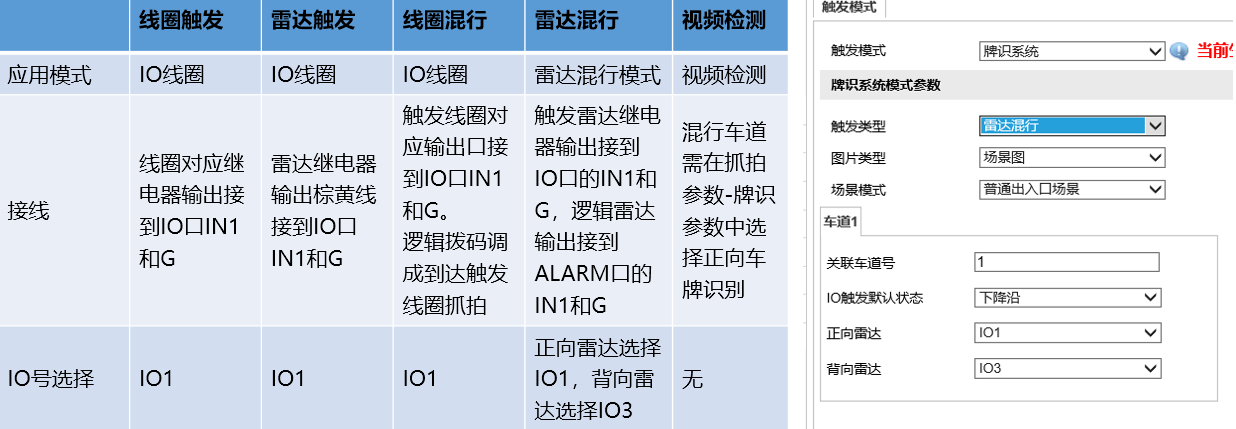
二、应用模式设定:
☛ 单进单出车道:
1、视频触发:过纯视频触发相机抓拍√ 触发类型:视频触发
√ 场景模式:
1)收费站:大车多,车头不全场景
2)地下停车场:全天比较暗场景
3)普通出入口:除以上其他场景
√ 非机动车抓拍使能:是否抓拍非机动车?
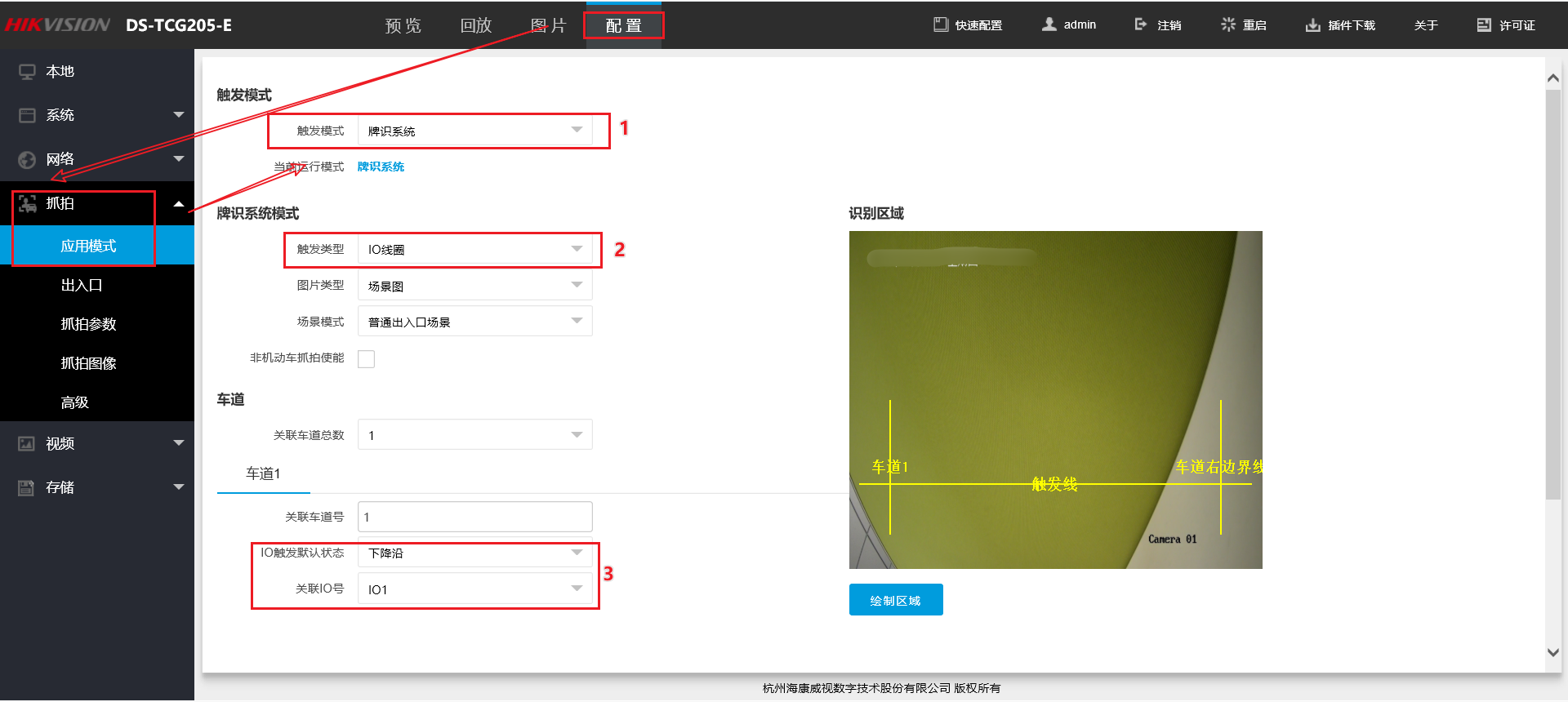
2、线圈或雷达触发:由外接开关量(线圈或雷达)信号触发相机抓拍
√ 触发类型:IO线圈
√ 场景模式:同上
√ 非机动车抓拍使能:开启后,非机动车触发抓拍时,上传车型为二轮车;不开启,还是会出图,车型为未知。
√ IO触发默认状态:选择下降沿
√ 关联IO号:根据触发信号接入选择,IN1对应IO1,以此类推。
☛ 出入混行车道(出口和入口在同一车道):
1、视频触发或线圈触发:配置和单进单出车道配置一致!
注意:线圈混行,需将逻辑线圈接入车检器
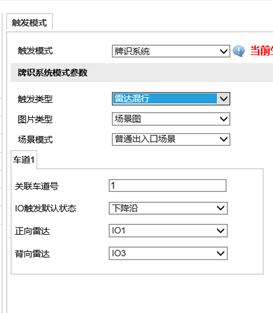
2、雷达混行:
√ 触发类型:雷达混行
√ 场景模式:同上
√ 非机动车抓拍使能:开启后,非机动车触发抓拍时,上传车型为二轮车;不开启,还是会出图,车型为未知。
√ IO触发默认状态:选择下降沿
√ 关联IO号:
正向雷达:选择IO1,对应触发雷达接IO口的IN1和G
背向雷达:选择IO2,对应逻辑雷达接AlarmIN口的IN1和G
具体可参考:
三、配置界面参考
1、新版本抓拍机:
操作路径:配置——抓拍——应用模式
2、老版本抓拍机:
操作路径:高级配置——设备配置——应用模式

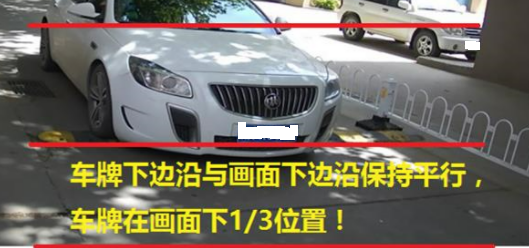
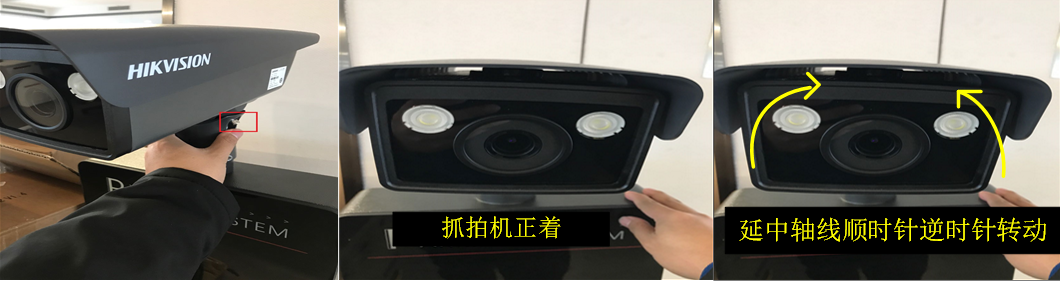
第三步:车牌摆正
1、调整相机角度,使车牌在图像中与图像下边沿保持水平。
2、相机角度调整方式,沿着相机中轴线顺时针逆时针旋转。
第四步:识别位置及车牌像素点
一、识别位置及车牌像素点:
调试时将车辆停在触发位置(触发线圈/雷达起始位置,视频触发一般将车停在离相机4米位置)
1、识别位置
进入预览界面查看抓拍机抓拍位置在整体图像的下1/3处效果最佳,如下图所示。
2、车牌像素点标准:
√ 小车牌:80-120
√ 大车牌:120-180(强烈推荐:140-160)
√ 超大车牌:180-250
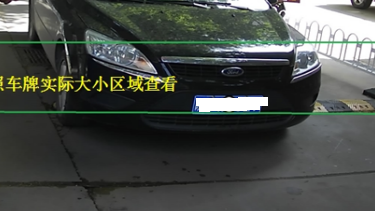
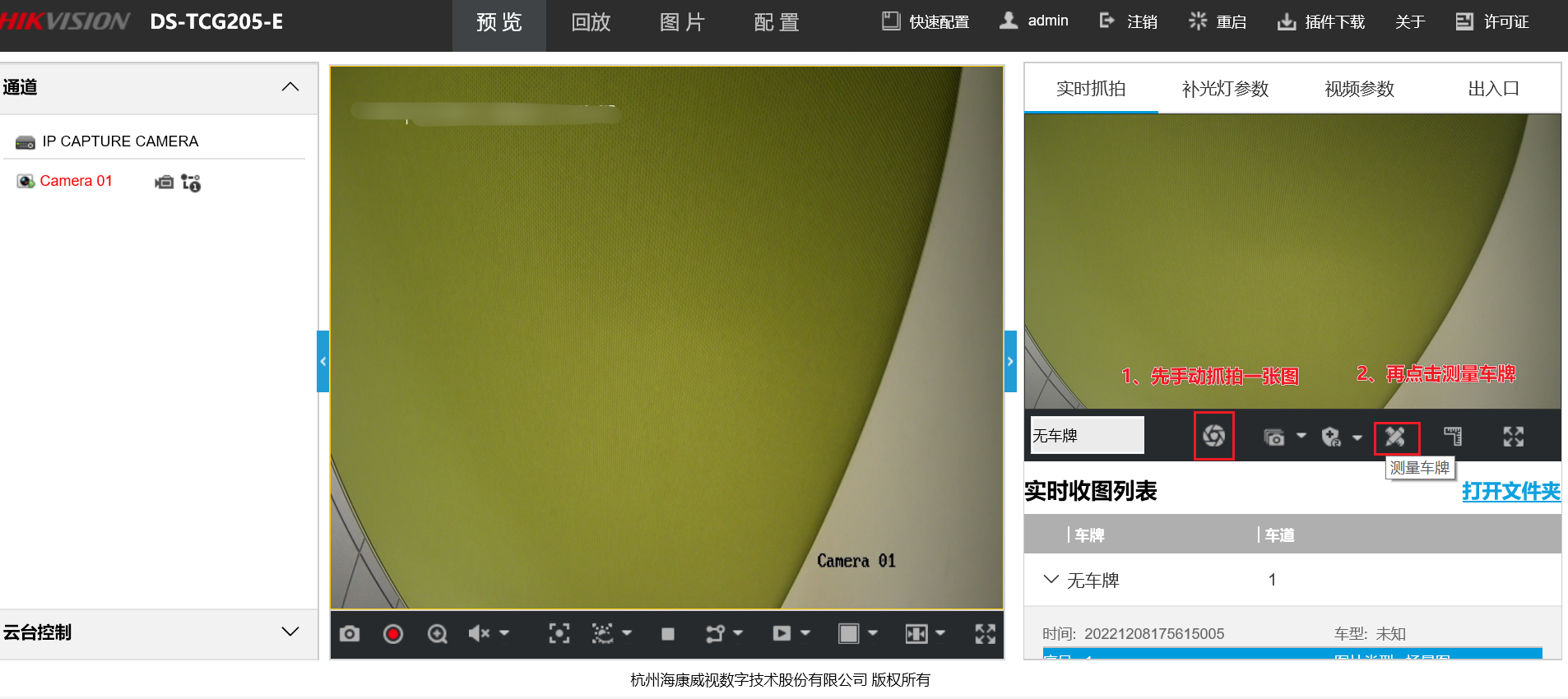
3、车牌像素点测量:
1)可在实时收图处测量(点击测量车牌,手动框选)。
☛ 新版本抓拍机:
☛ 老版本抓拍机:

注:也可在抓拍原图中通过画图工具打开查看
第五步:识别区域
注:识别区域一定要根据现场实际场景绘制,禁止用默认区域或随意乱画!
需要注意画车道线,两根车道线夹着的区域为牌识区域,如下图所示,红色虚线和车道线组成的区域为牌识区域。

1、车牌抓拍时候,车牌本身必须在两条车道线所包围的识别区域内部;
2、识别区域包含抓拍前的轨迹区域;
3、无关区域不要过分绘制,会影响识别速度;
4、具体可参照上图
二、像素点调节操作:
快速配置界面:
1、先进行镜头初始化,再进行一键聚焦(新相机调试时必须先镜头初始化)
2、测量此时车牌像素点,若不符合要求,进行手动调焦聚焦微调,直到像素点达到140-160
进入预览—云台控制(左侧)
调焦+/-:调节镜头远近(如像素点过小可拉近镜头)
聚焦+/-:使车牌变清晰
三、绘制识别区域操作:
可直接点击快速配置界:拖动触发线,车道线1和右边界线按标准绘制即可。
1、新版本抓拍机:

2、老版本抓拍机

第六步:抓拍参数设置(牌识参数 → 补光灯参数 → 车辆特征参数)
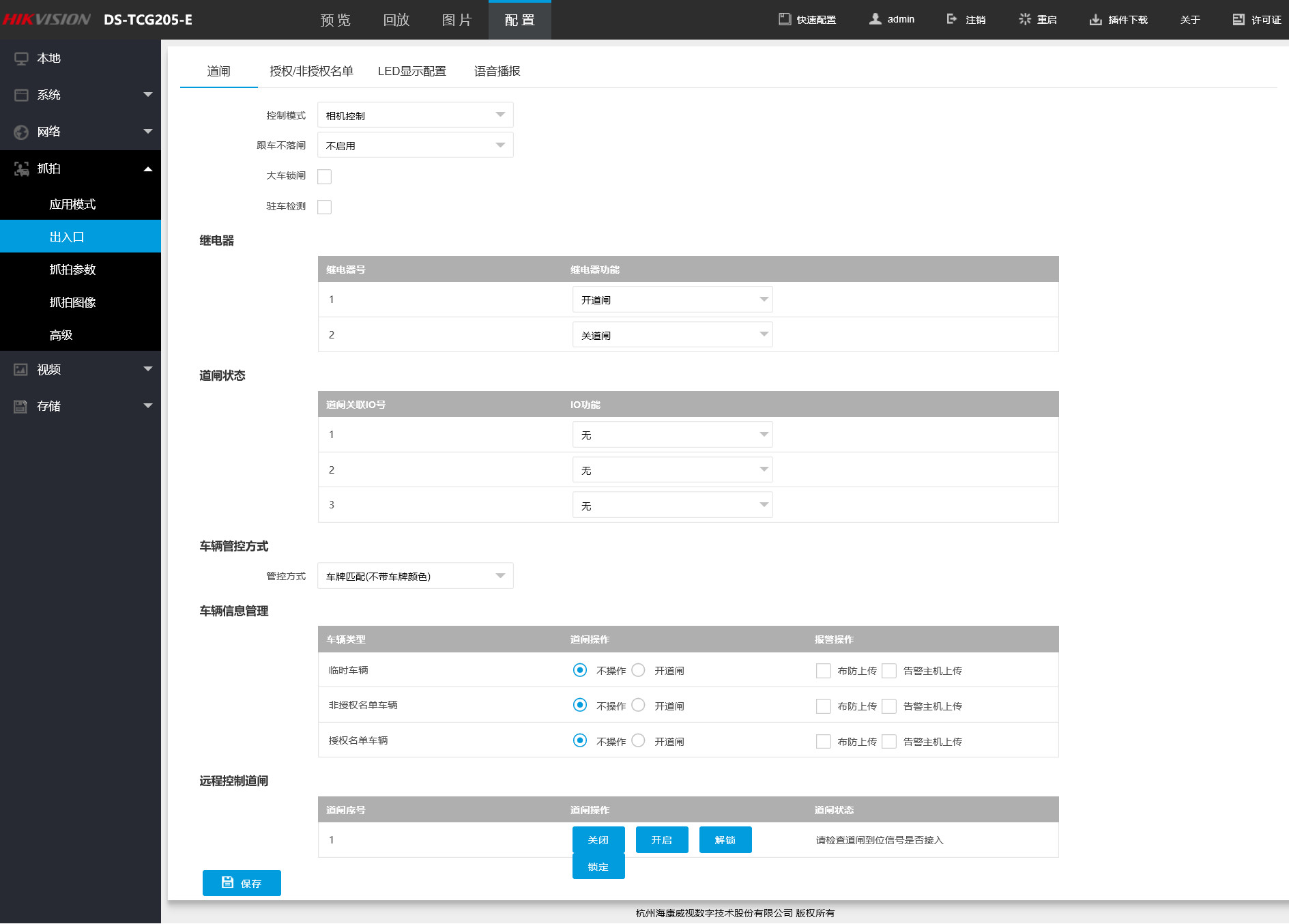
第七步:出入口设置
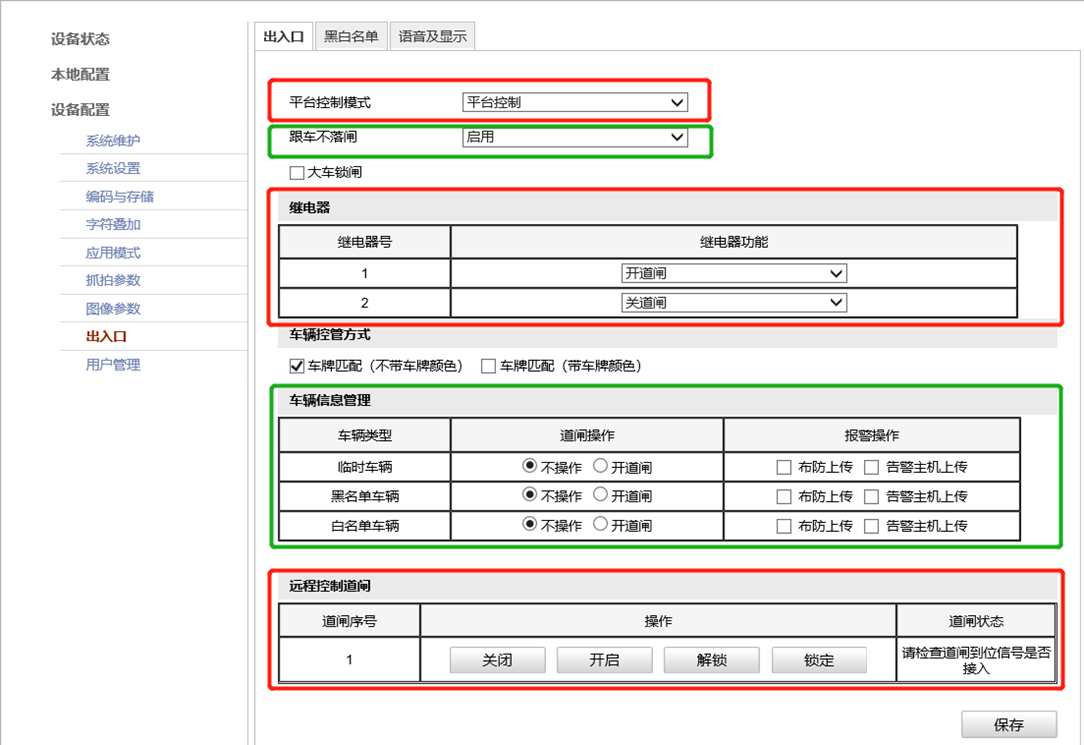
出入口设置参数说明:
1、控制模式:
√ 平台控制:使用终端、平台控制的都选平台控制。
√ 相机控制:相机独立使用或者白名单前置使用,相机通过根据车辆信息管理规则控制,自己判断开闸;相机不操作的车辆类型,再交给平台控制。
√ 混合控制:OTAP上云协议模式下使用。
2、跟车不落闸
过车时抓拍机检查范围内有车时会进行锁闸,无车时落闸。
3、大车锁闸
开启后,过大车时可进行锁闸延时落杆,避免砸车。
4、继电器
对应继电器的功能类型;继电器1对应1A-1B;继电器2对应2A-2B
6、车辆信息管理
车辆放行规则设置,在相机控制模式下有效
7、远程控制道闸
可通过此处检测相机到道闸之间的线路连接是否正常?
——————————————————–
☛ 新版抓拍机操作界面:
路径:配置——抓拍——出入口——道闸
☛ 旧版抓拍机操作界面:
路径:高级配置——设备配置——出入口——出入口
第八步:黑白名单设置(可选)
支持导入黑白名单
一定要按照模板导出示例填写,不能更改格式,否则会导入失败,导入失败按照提示进行内容调整后再导入。
第九步:语音及显示配置
☛ 新版本抓拍机LED显示配置

☛ 新版本抓拍机语音播报配置


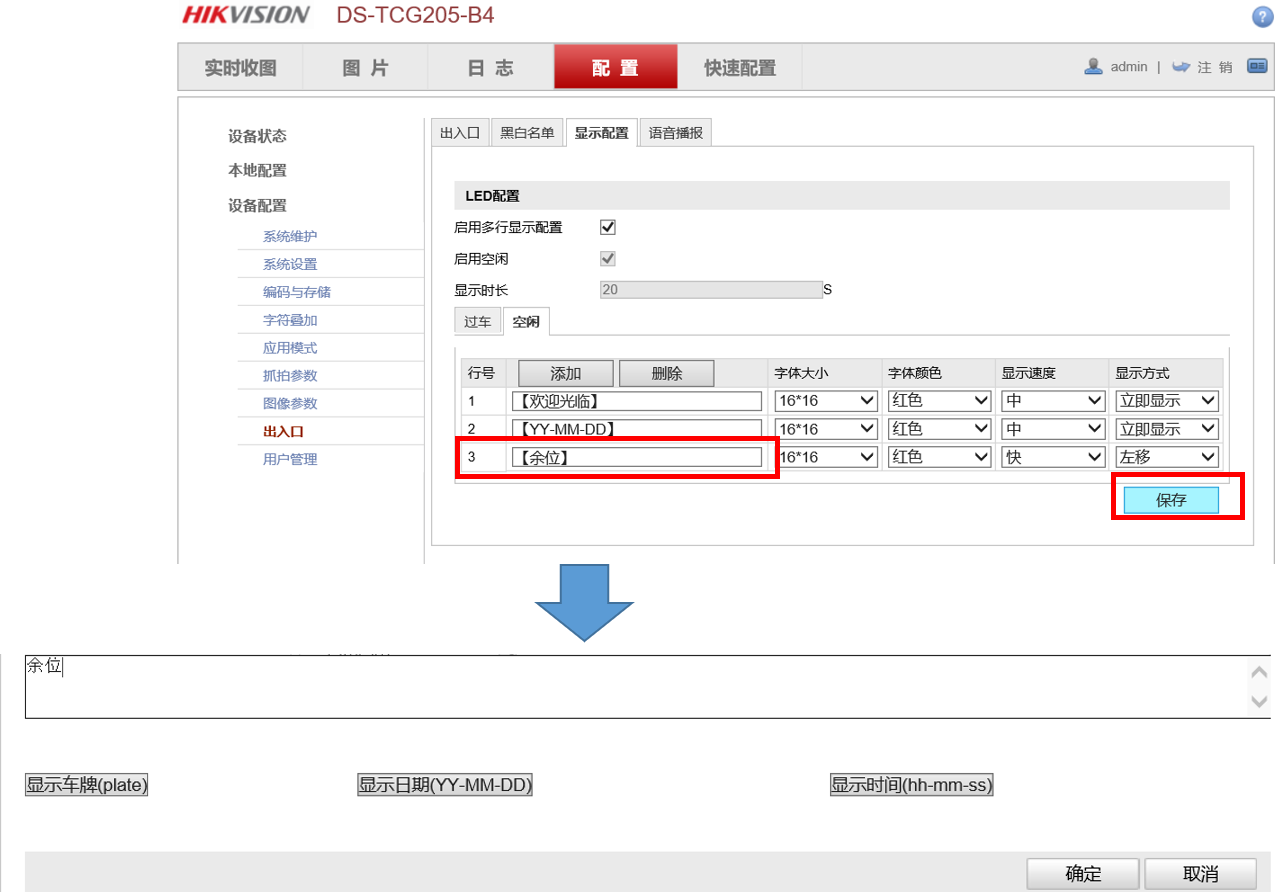
☛ 老版本抓拍机语音及显示
1、显示车牌
默认启用,可以显示空闲内容(过车显示在pms参数设置中配置)
2、显示内容
使用举例(每行用空格隔开):欢迎光临 [年月日] [时分秒] [余位]
支持显示余位信息,每行超过四个汉字左移显示
3、语音配置
播报车牌默认不启用,否则会重复播报,相机控制时启用

☛ 老版本抓拍机空闲显示配置
✔ 启用多行显示配置:默认勾选
✔ 启用空闲和显示时长默认固定,无需修改
显示内容:
1、固定内容(车牌,日期,时间)可直接点击后保存 。
2、自定义内容输入汉字即可,保存后自动会更改格式。
(如:若要显示余位,直接输入余位两个字,保存即可,会自动更改格式)
☛ 老版本抓拍机过车显示配置
1、若单机使用,则可根据实际需求配置。
2、若搭配终端pms使用,相机网页上过车内容需和空闲内容保持一致。

☛ 老版本抓拍机语音播报配置
1、搭配终端pms使用时,无需启用,以pms下发播报为准。
2、若单机使用,则可选择启用播报。

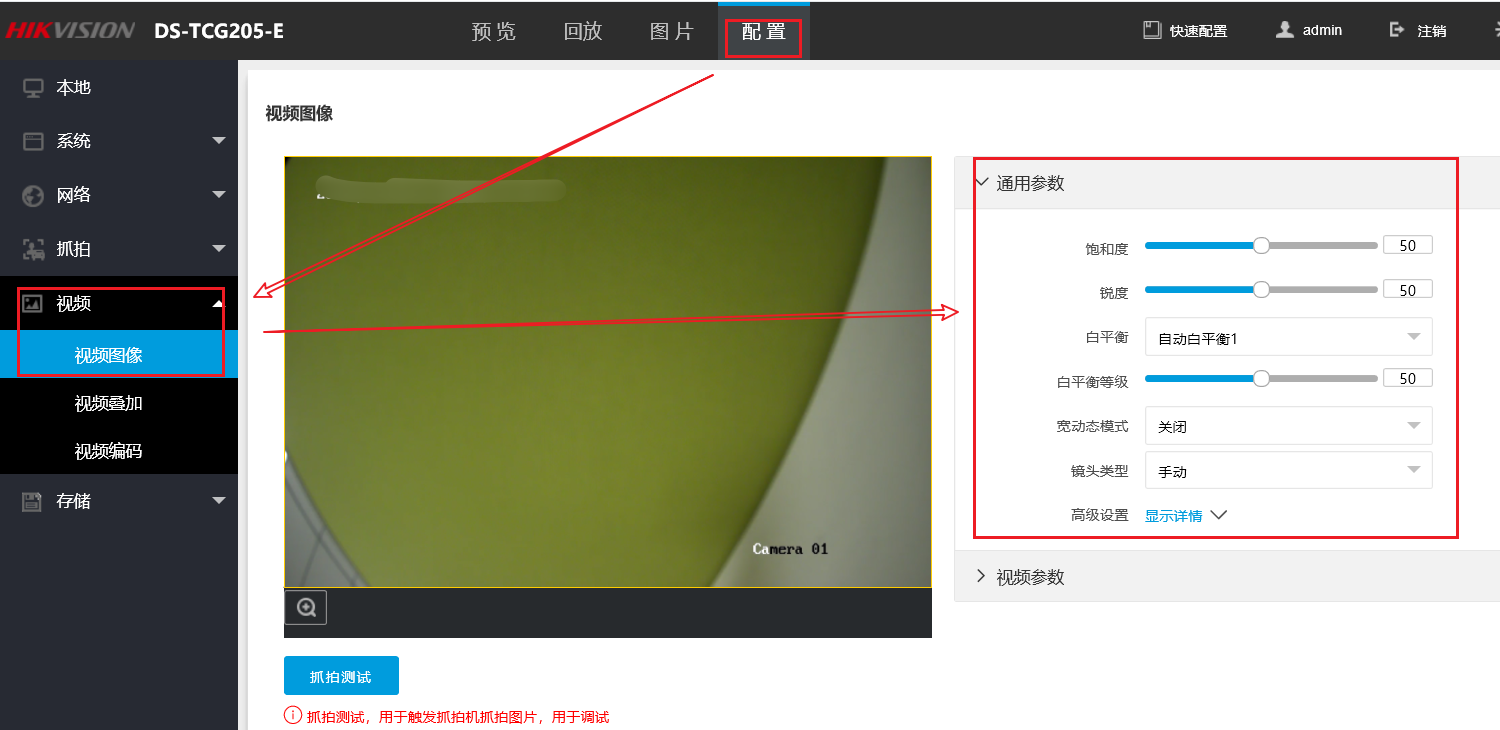
第十步:图像参数
一、通用参数
1、宽动态
夜间如果车灯过亮导致图像过曝,可按照时间开启宽动态抑制车灯;
注意:宽动态开启会导致图像噪点增大,不必要时候不需要开启;
2、镜头类型
默认手动
3、启用车牌亮度补偿
解决顺逆光问题,顺光时抑制过曝;逆光时过暗增强
☛ 新版本抓拍机:
路径:配置——视频——视频图像——通用参数
☛ 旧版本抓拍机:
路径:高级配置——设备配置——图像参数——通用参数

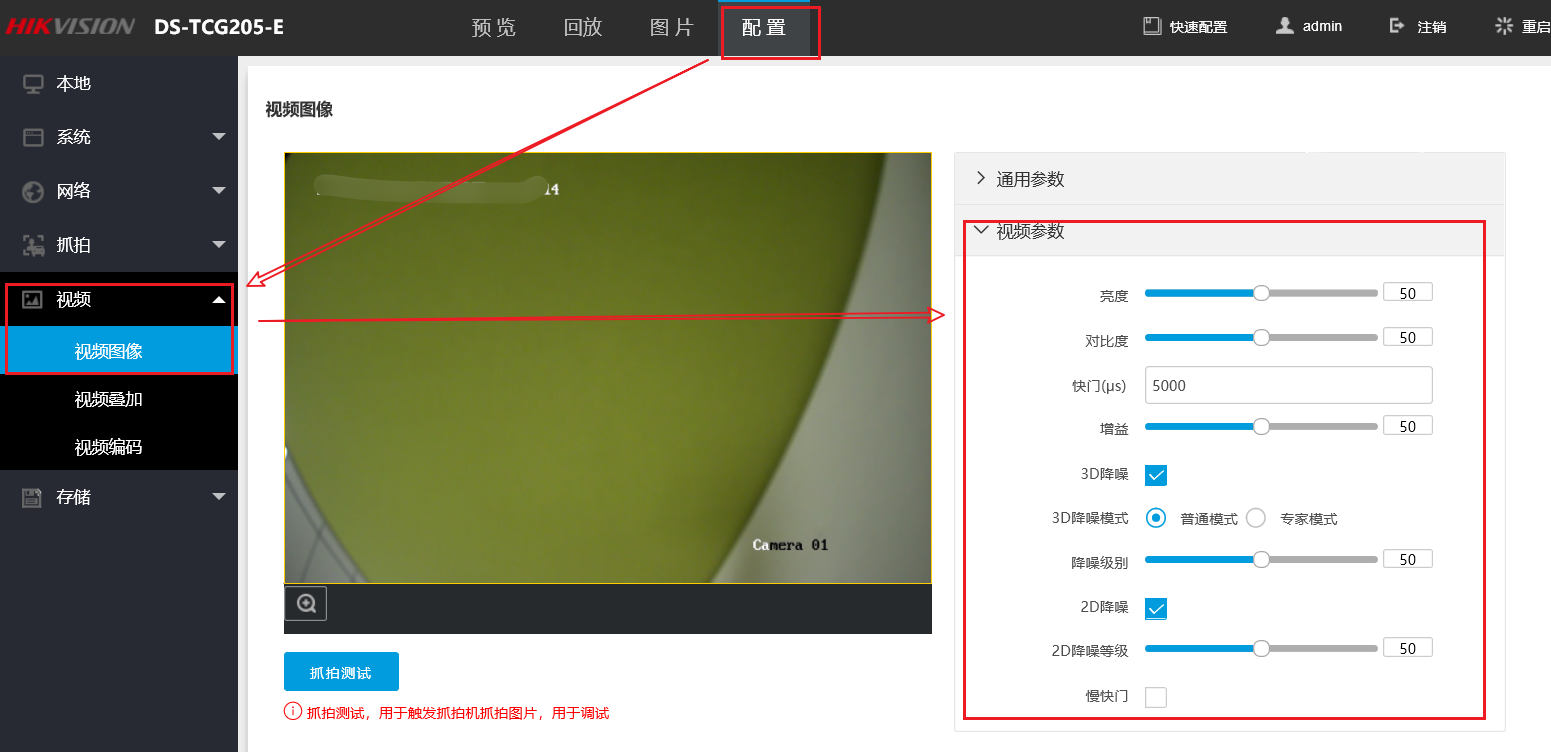
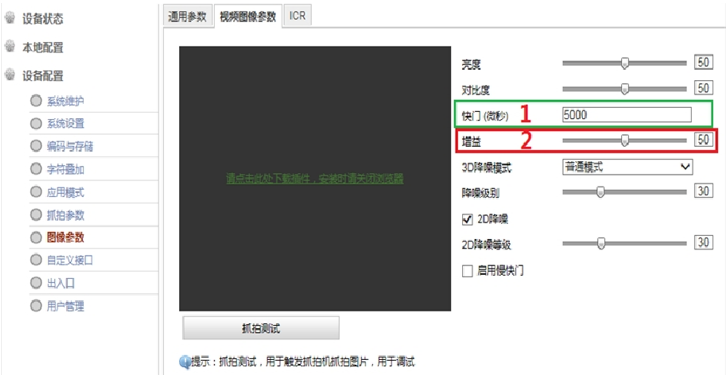
二、视频图像参数
1、快门:夜间如果图像过曝,可适当拉低快门
2、增益:夜间如果图像过曝,可适当降低增益
☛ 新版本抓拍机:
路径:配置——视频——视频图像——视频参数
☛ 旧版本抓拍机:
路径:高级配置——设备配置——图像参数——视频图像参数
三、ICR及定时模式
1、ICR:开启ICR切换可实现红外补光(解决白光污染问题)。
2、定时模式(推荐):夜晚时间配置与补光灯参数中常亮灯开启时间保持一致。

通用接线流程:
基础流程:车辆驶入→ 触发检测(线圈/雷达) → 抓拍+鉴权 → 开闸 → 车辆进入防砸区域 → 触发防砸 → 车辆驶离 → 自动落杆
1、触发检测
请参阅 :海康威视出入口抓拍机触发检测接线指导
2、鉴权(抓拍机+终端)
抓拍机与终端接线:
抓拍机与终端通过网线、交换机连接在同一个局域网即可(不走开关量信号)。

3、开闸(抓拍机+道闸)
请参阅 :海康威视常见抓拍机和道闸的接线方法
4、防砸
道闸+车检器+防砸线圈
一、设备及端子接线示意图

1、防砸线圈:
接车检器LOOP2-A、LOOP2-B
2、车检器:
车检器的继电器输出RELAY2-1和继电器输出RELAY2-2接道闸地感和公共:
情况1:RELAY2_1接道闸的红外/地感+,RELAY2_2接道闸的红外/地感-
情况2:RELAY2_1接道闸的地感+,RELAY2_2接道闸的地感-
情况3:RELAY2_1接道闸的地感,RELAY2_2接道闸的地线
情况4:RELAY2_1接道闸的地感,RELAY2_2接道闸的公共
情况5:RELAY2_1接道闸的地感,RELAY2_2接道闸的GND
情况6:RELAY2_1接道闸的地感输入+,RELAY2_2接道闸的地感输入-
情况7:RELAY2_1接道闸的地感LOOP,RELAY2_2接道闸的GND(电源)
注:不同型号的道闸实际端子标识不一样,以上是所有情况,您可按实际端子标识接线。
道闸+防砸雷达

道闸的地感和公共接防砸雷达的(J1-1)(棕)和(J1-2)(黄)(不区分正负):
情况1:J1-1(棕色)接道闸的红外/地感+,J1-2(黄色)接道闸的红外/地感-
情况2:J1-1(棕色)接道闸的地感+,J1-2(黄色)接道闸的地感-
情况3:J1-1(棕色)接道闸的地感,J1-2(黄色)接道闸的地线
情况4:J1-1(棕色)接道闸的地感,J1-2(黄色)接道闸的公共
情况5:J1-1(棕色)接道闸的地感,J1-2(黄色)接道闸的GND
情况6:J1-1(棕色)接道闸的地感输入+,J1-2(黄色)接道闸的地感输入-
情况7:J1-1(棕色)接道闸的地感LOOP,J1-2(黄色)接道闸的GND(电源)
注:不同型号的道闸实际端子标识不一样,以上是所有情况,您可按实际端子标识接线。
注:验证方法
设备上电后实际过车测试,开闸后将车辆停在防砸线圈上,通过遥控器或控制盒点关闸,道闸不会落杆则验证防砸起效;将车辆开离防砸区域后,道闸才会自动落杆。
抓拍机+车检器+触发线圈
一、非混行方案(一进一出)(抓拍机+车检器+触发线圈):
1、中间架设
优点:出入分离,管理简便,通行效率高。
缺点:中间架设安全岛对于车道宽度,有一定要求,不适用较窄车道。

2、两边架设
优点:平时出入分离,特殊情况下可以两边同时开启以便于通行大型车辆;不需要中间预留安全岛位置,对车道空间利用率更高。
缺点:两边架设在包含辅助抓拍机的场景下有对向行车干扰的风险 Ø需绘制车道线或其他手段人为引导规范行车轨迹,避免出入相互干扰。

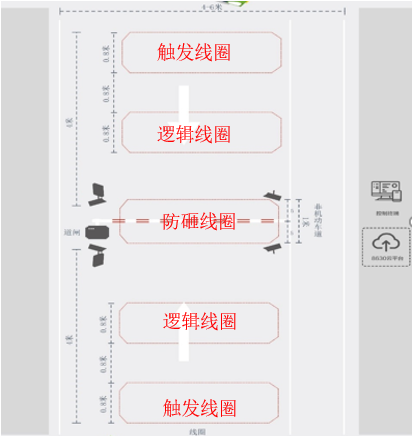
二、混行方案(出入混行)(抓拍机+车检器+触发线圈+逻辑线圈):
优点:可以通过逻辑线圈以及逻辑雷达实现单车道出入;对于出入口资源紧张,车道较窄场景,是个很适宜的解决方案。
缺点:由于需要另外架设逻辑雷达/线圈,对现场场景规范要求更高;一车一杆,双向来车需依次通过,通行效率较低。

抓拍机+触发雷达
一、非混行方案(一进一出)(抓拍机+触发雷达)
1、中间架设
优点:出入分离,管理简便,通行效率高。
缺点:中间架设安全岛对于车道宽度,有一定要求,不适用较窄车道。

2、两边架设
优点:平时出入分离,特殊情况下可以两边同时开启以便于通行大型车辆;不需要中间预留安全岛位置,对车道空间利用率更高。
缺点:两边架设在包含辅助抓拍机的场景下有对向行车干扰的风险 ,需绘制车道线或其他手段人为引导规范行车轨迹,避免出入相互干扰。

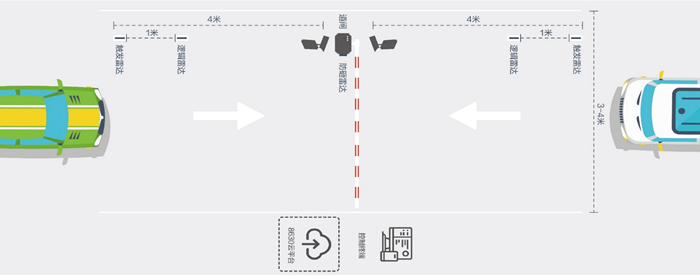
二、混行方案(出入混行)(抓拍机+触发雷达+逻辑雷达)
优点:可以通过逻辑线圈以及逻辑雷达实现单车道出入;对于出入口资源紧张,车道较窄场景,是个很适宜的解决方案。
缺点:由于需要另外架设逻辑雷达/线圈,对现场场景规范要求更高;一车一杆,双向来车需依次通过,通行效率较低。

设置起杆频率:
当数码管显示”F0.00“时,按”确定“键进入,使用![]() 键控制光标的位置,光标闪烁时即可按
键控制光标的位置,光标闪烁时即可按![]() 键或
键或![]() 键修改相应位置的参数值 ,修改完成后按”确定“键保存
键修改相应位置的参数值 ,修改完成后按”确定“键保存
注:参数值以起杆稳定为宜
设置落杆频率:
当数码管显示”F0.01“时,按”确定“键进入,使用![]() 键控制光标的位置,光标闪烁时即可按
键控制光标的位置,光标闪烁时即可按![]() 键或
键或![]() 键修改相应位置的参数值 ,修改完成后按”确定“键保存
键修改相应位置的参数值 ,修改完成后按”确定“键保存
注:参数值以落杆稳定为宜