

注意:雷达第一次上电绿灯常亮是正常情况,触发一次即可正常使用,若触发了还是常亮则开始排查
1、检查雷达供电是否正常,雷达供电要求DC12-1A以上,使用雷达自带适配器供电,严禁从道闸控制板上12V取电,道闸控制板上12V不稳定,道闸运行时存在压降;
2、检查雷达接线头是否做好绝缘(白、紫、绿、蓝),这四芯线在雷达调试好后用胶带分别包好,做好绝缘;
3、若上面排查正常则一般为检测范围内有虚警点引起,请打开安卓端上位机核实雷达版本查看雷达目标分布,具体如下操作:
①正确连接WiFi;
②回读雷达目前参数信息,读取参数—雷达信息,确保雷达版本为最新
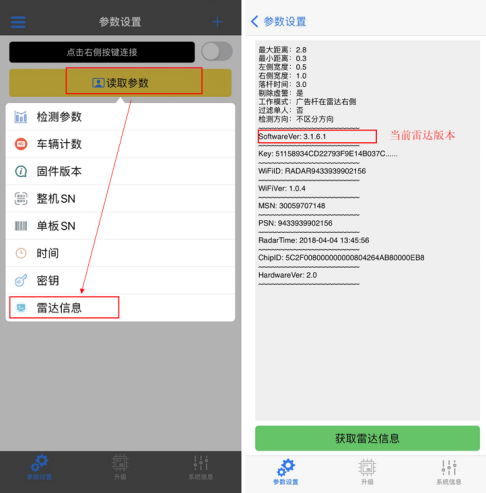
③最远检测距离设置为雷达到闸杆尾部水平距离减去0.2米(触发雷达车道减去0.2米),点击“系统信息”中“开启”按钮;
④点击“关闭”按钮,虚警点坐标会显示在屏幕中,“X轴坐标”为雷达左右距离,“Y轴坐标”为雷达前方距离;
⑤杆子完全抬起后,在检测区域有固定的虚警点 ;
如果虚警点Y坐标小于1米,“最小距离”设置值大于虚警Y坐标即可,
如果虚警点Y大于等于1米,则开启剔除虚警。
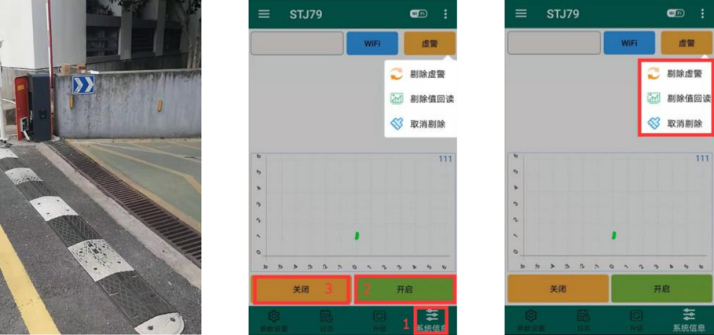
⑥如上图场景,杆长4m,虚警点在Y轴 1-2m范围内,此时需确认固件版本:
此功能适用上位机:安卓端 app——V1.6 及其之后版本;
此功能版本:STJ79_3H_V3.X.3.7.bin 及之后版本;
⑦点击“剔除虚警”按钮,剔除虚警时雷达前方不能有人或车经过,杆为垂直状态,持续时间约5s,待回复设置成功后,剔除完成;
⑧点击“开启”按钮,查看是否还有虚警点,若仍有虚警点需重新剔除;
⑨点击“剔除值回读”按钮,与之前虚警点进行对比,看点分布是否一致, 若一致则剔除无误(剔除点与虚警点不会完全一致,但是分布上不会有大的差异)
注:使用剔除虚警功能需要把杆抬起操作,广告杆、栅栏杆水平状态使用此 功能会误把杆当做虚警剔除,导致检测不稳定。
4、若上电后范围内有目标,但是目标无法移开,绿灯常亮
如下场景左侧有虚警,-0.7:X轴坐标左侧最小值为0.7m,实际设置减去0.3m,需要把“左侧宽度”设置为0. 4m或更小。雷达计算检测范围时仅左侧、右侧宽度会外扩0. 3m,最远、最近检测距离按实际距离计算
