适用型号:XM68XX系列、XM88XX系列
注:配置前先激活摄像机
一、规则配置总流程
路径:【智能分析】一【客流量】
1、启用客流量
2、手动标定镜头距离踏板区域高度
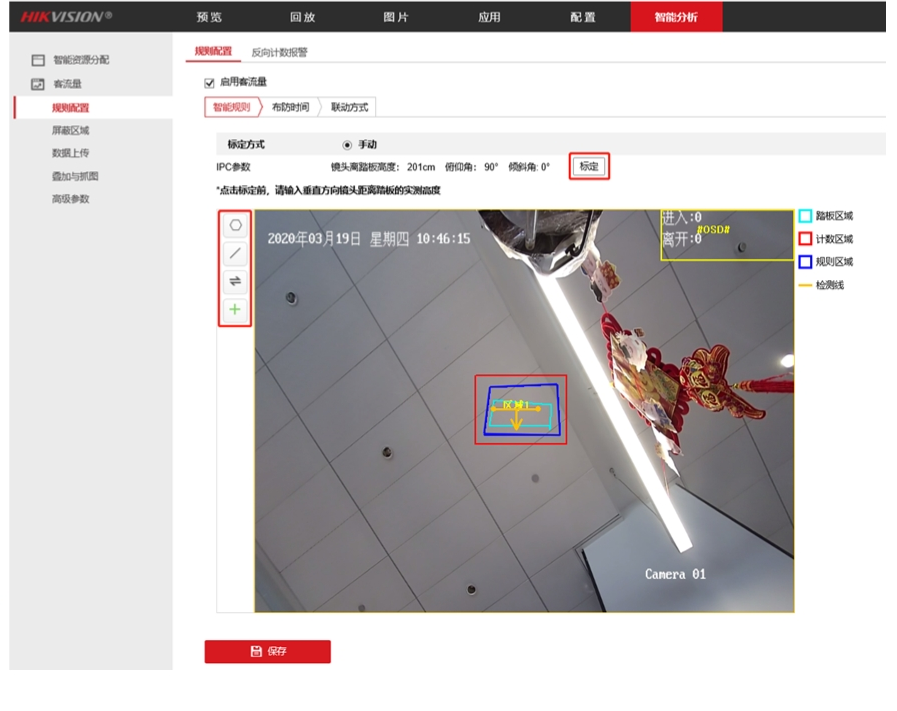
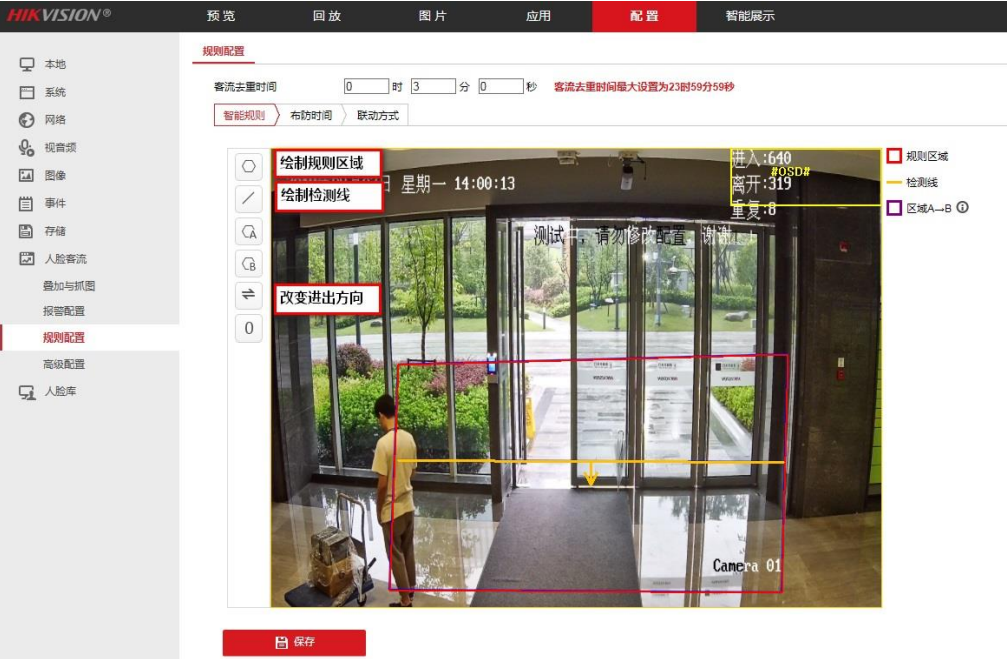
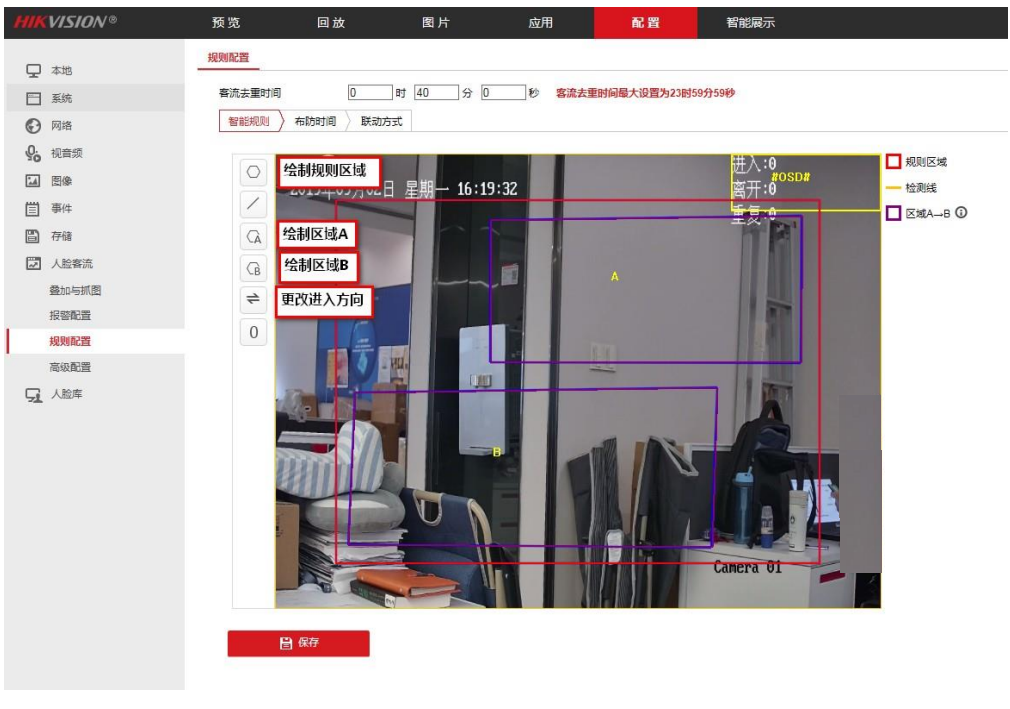
3、绘制规则区域
4、绘制踏板区域
5、绘制规则线
6、调整检测线位置方向
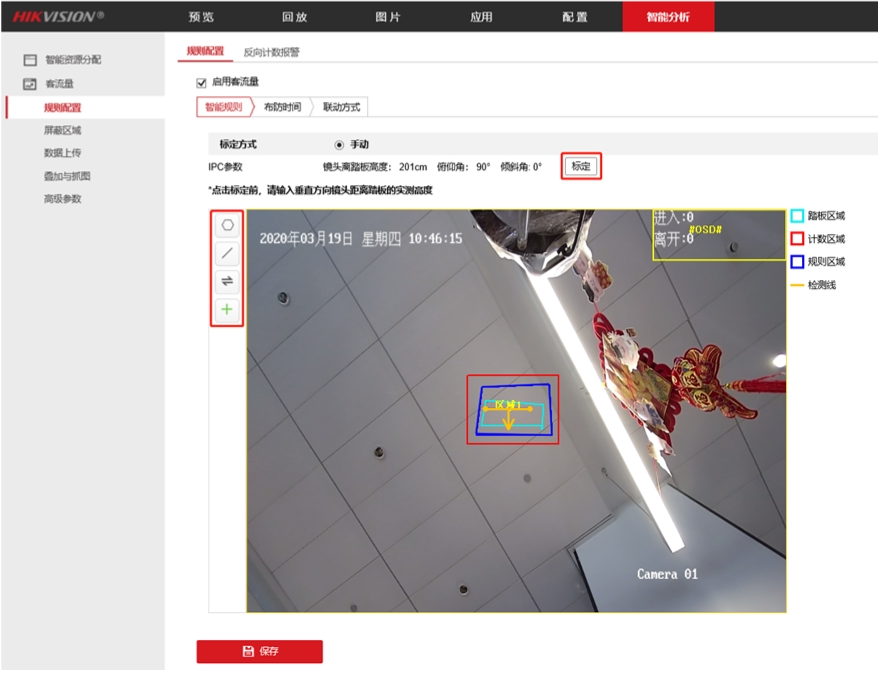
操作说明:
1、红色检测框
根据标定的高度,由算法生成最大检测区域,无法进行缩放和移动
2、蓝色规则框
绘制的检测区域,根据现场车型情况绘制,需包含 (车外环境+脚踏板
区域+车内环境)三部分。
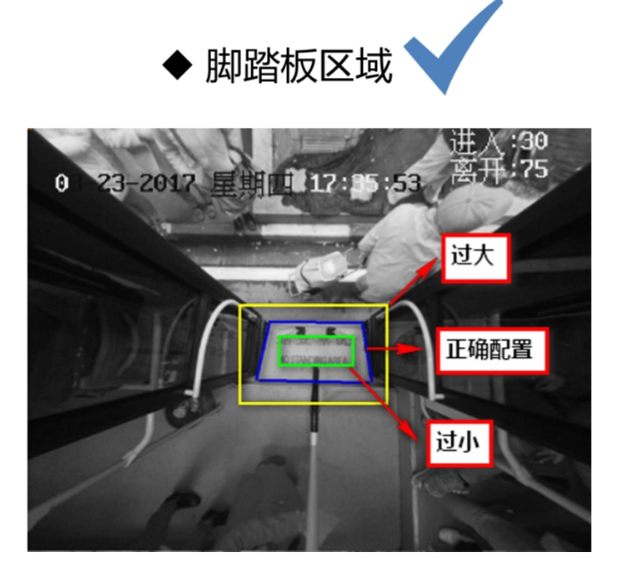
3、脚踏板区域
在车辆开门时配置区域,多级台阶车辆建议将第一级脚踏板区域设置成
脚踏板区域。
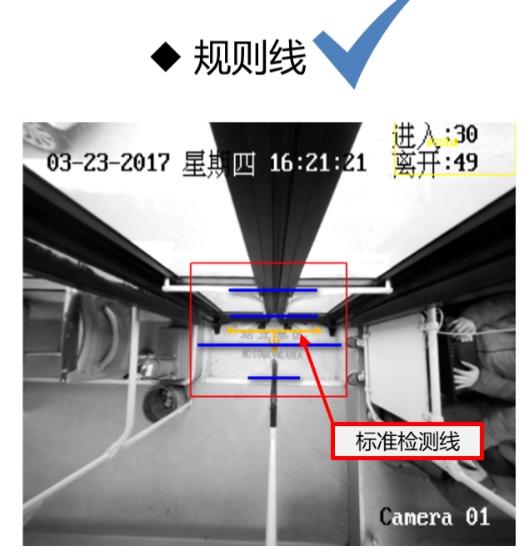
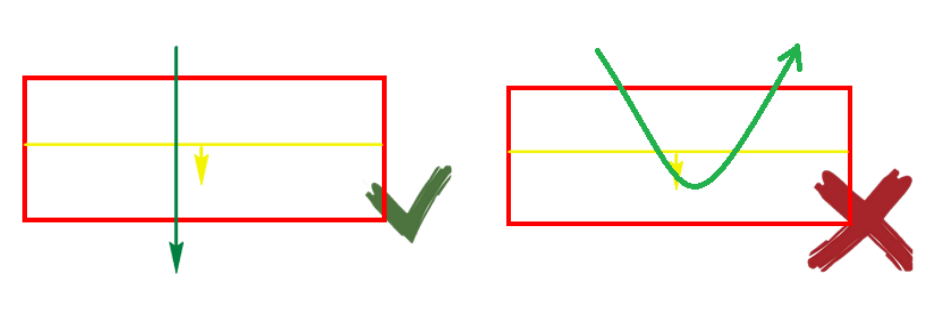
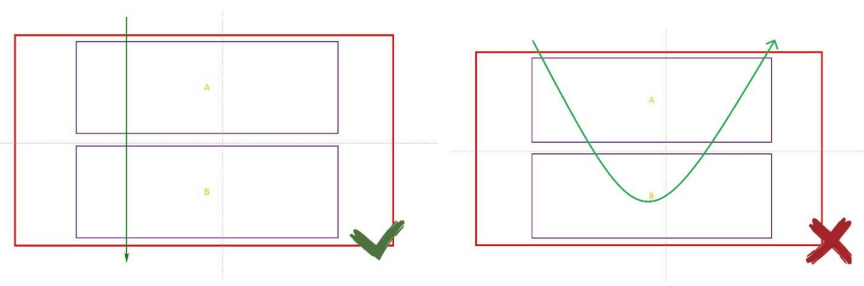
4、检测线绘制
在车辆开门时绘制规则线,请在脚踏板区域内绘制规则线,尽量靠近车
门处。
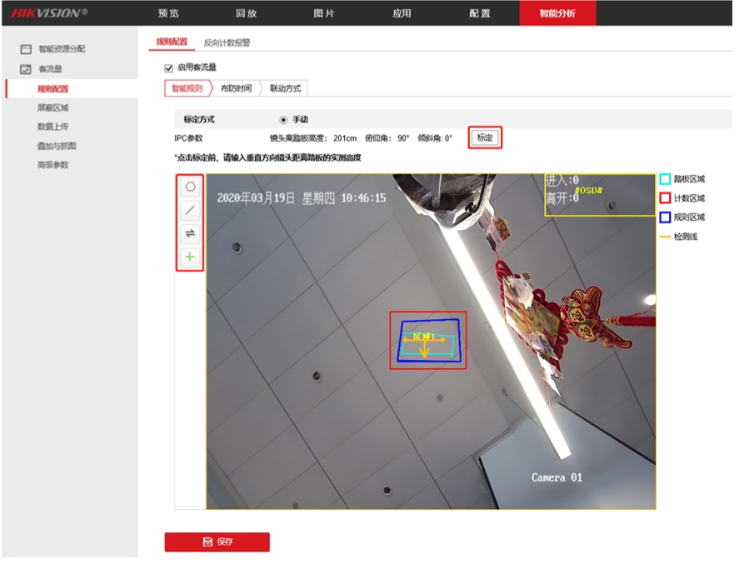
标准配置图
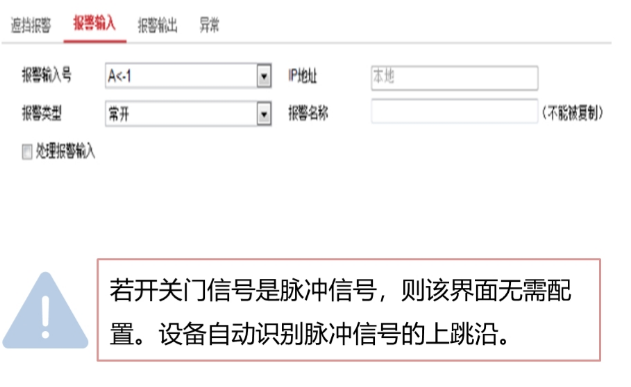
二、开关门信号配置
路径:[配置]一[事件]一[报警输入]
报警输入信号类型选择电平信号触发需要根据开关门状态配置报警类型
(仅需配置该项,其余选项默认不动)
1、高电平对应开门、低电平对应关门,则配置成“常开”
2、低电平对应开门、高电平对应关门,则配置成“常闭”
三、数据上传
路径:[智能分析]一[数据上传]
根据现场情况配置计数触发方式和报警输入信号类型,同时根据车载主机型号勾选是否启用485传输。

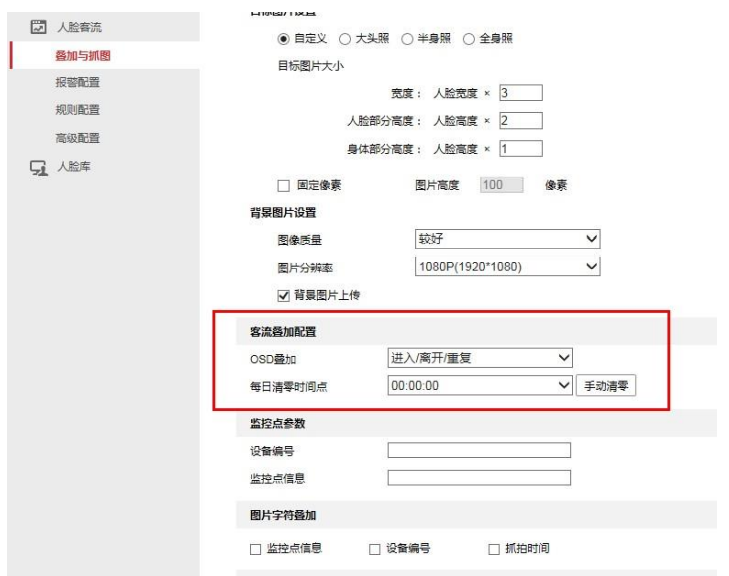
四、OSD叠加配置
路径:[智能分析]一[叠加与抓图)
可选择OSD叠加的内容、计数类型、每日清零时间点、手动清零当天数据。
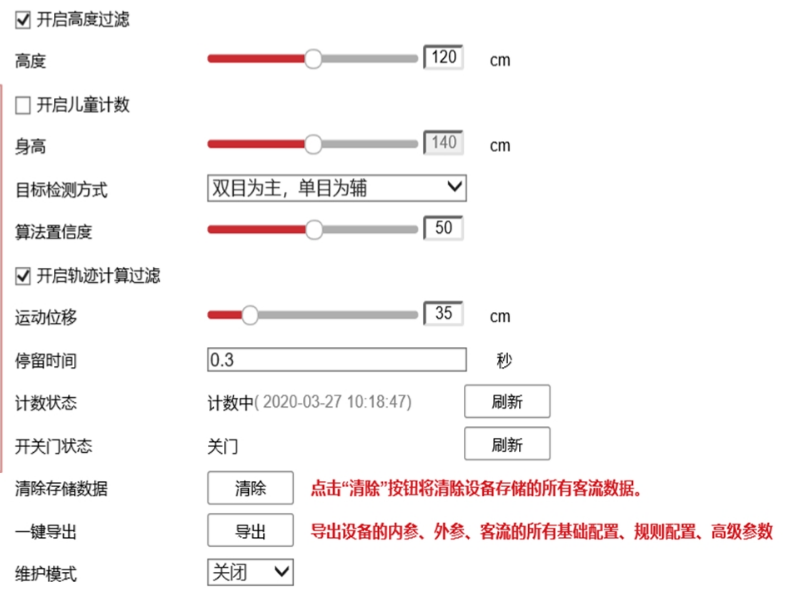
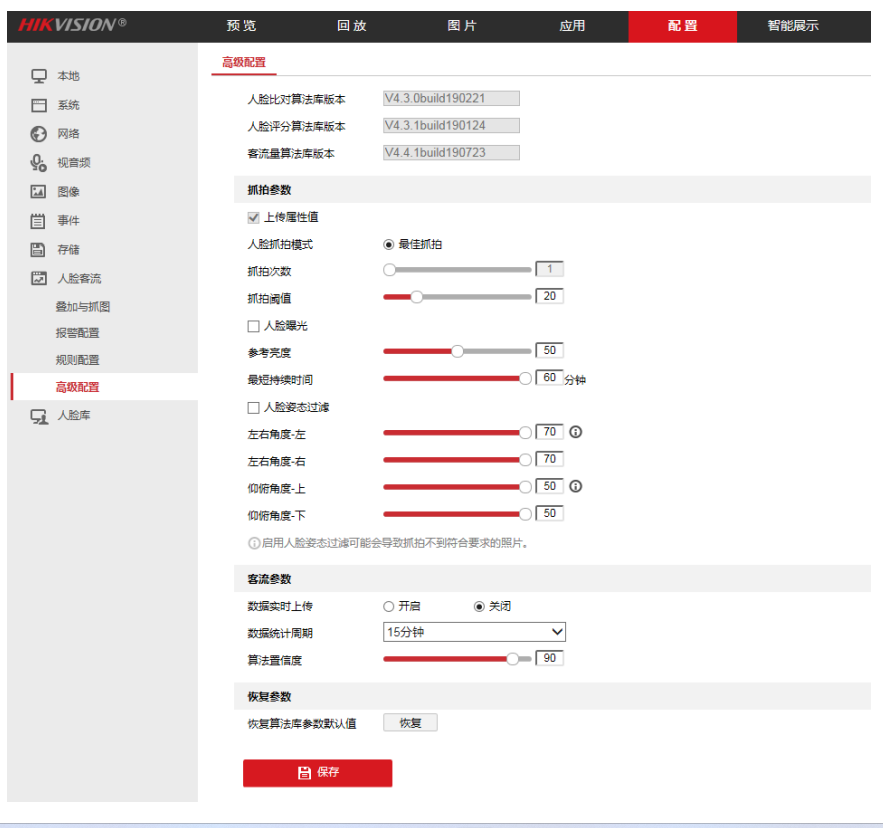
六、高级参数
1、开启高度过滤:为适应公交车环境1.2米以下小孩不投票,设备默认会开启高度过滤,高度闯值1.2米,该高度可调
2、开启儿童计数: 单独统计儿童上下客人数。
3、目标检测方式:共四种模式可选(双目为主、单目为辅;单目为主、双目为辅;仅双目;仅单目),默认为双目为主、单目为辅,根据适用场景选择对应模式
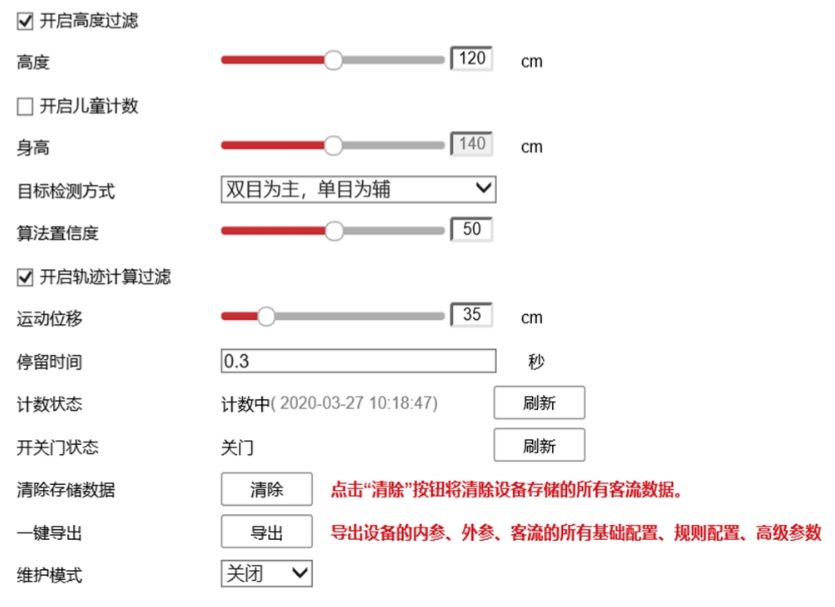
4、开启轨迹计算过滤:目标需同时满足运动位移和停留时间才会计数。
5、计数状态:查看设备当前的计数状态,有“计数中”、“计数停止”、“计数暂停
三种状态,计数中代表正常计数,计数暂停代表关门状态或现场场景过暗,计数停
止代表没有开启客流量功能
6、开关门状态:查看设备目前接收到的开关门状态信息,可以根据计数状态和开关门状态来查看设备开关门是否正确配置,是否正常计数,这两个状态需要手动刷新
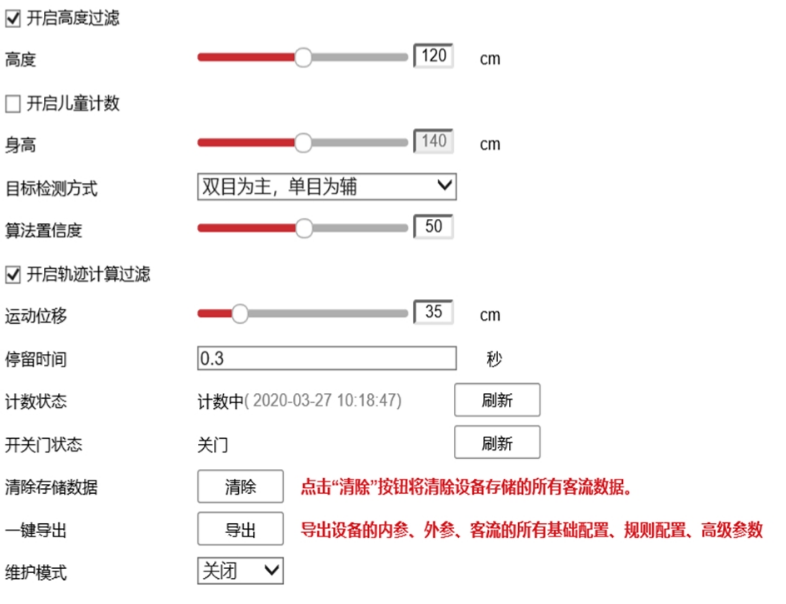
7、清除储存数据:清除所有客流数据,慎用!
8、键导出:将导出设备的内参、外参、客流的所有基础配置、规则配置、高级参数
9、维护模式:正常使用时不开,排查问题时建议开启,根据子码流显示的POS信息和深度图效果调整参数




 (2)报警上传配置:设备的人脸抓拍、人脸比对、客流等信息的上报,可以根据实
(2)报警上传配置:设备的人脸抓拍、人脸比对、客流等信息的上报,可以根据实