注:DS-TMC407、DS-TMG80X在接线方式上有所不同,其它调试方法一致
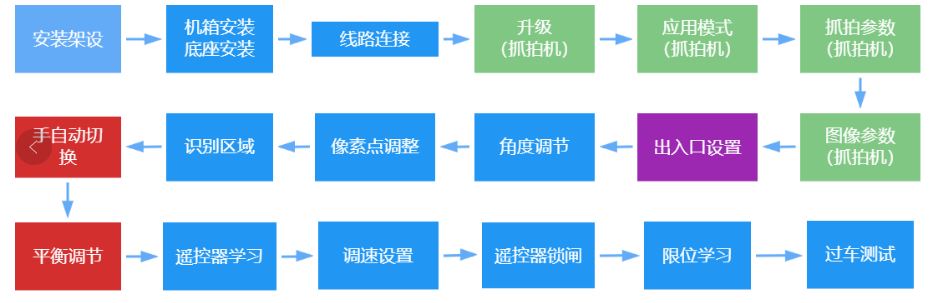
安装流程如下图:
一、底座安装
1、架设标准
道闸安装位置必须满足栏杆摆动的空间充足
选择水平安装地面
预埋线缆,穿线管需高出地面50 mm,防止路面积水进入线缆导致短路
靠墙安装时,道闸后盖与墙面至少预留200mm空间,方便接线等操作
2、抓拍距离
抓拍位置离抓拍机3.5-5
3、底座固定
抓拍显示一体机通过膨胀螺丝与压条固定到安装面上
步骤1:
根据一体机机箱的安装孔位尺寸图在安装面上做好标记;
步骤2:
用20号的冲击钻头在安装孔位上钻孔,深度12mm左右;
步骤3:
将直径16mm的膨胀螺栓打入安装孔内,拧紧螺母后,并退出螺母;
步骤4:
将一体机箱体放在安装孔位上,将两块一体机压条,倒扣在相应的安装孔位上,一边拧紧螺母,一边调整一体机箱体的垂直度,使箱体垂直并稳定住
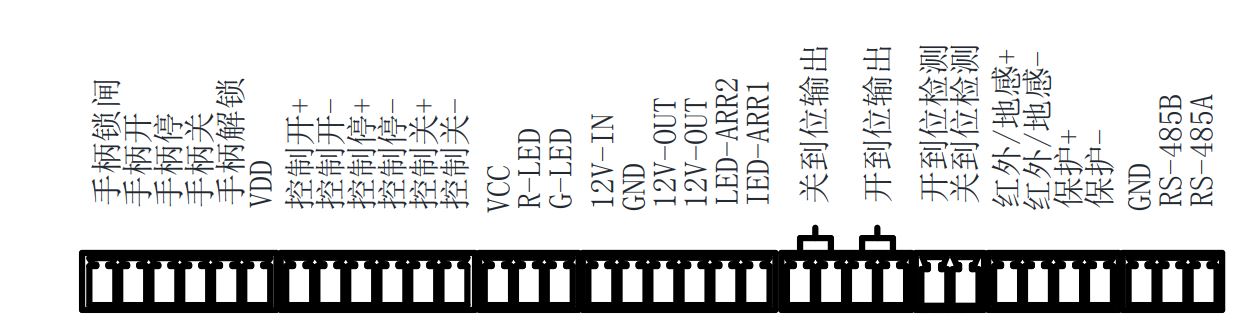
二、线路连接
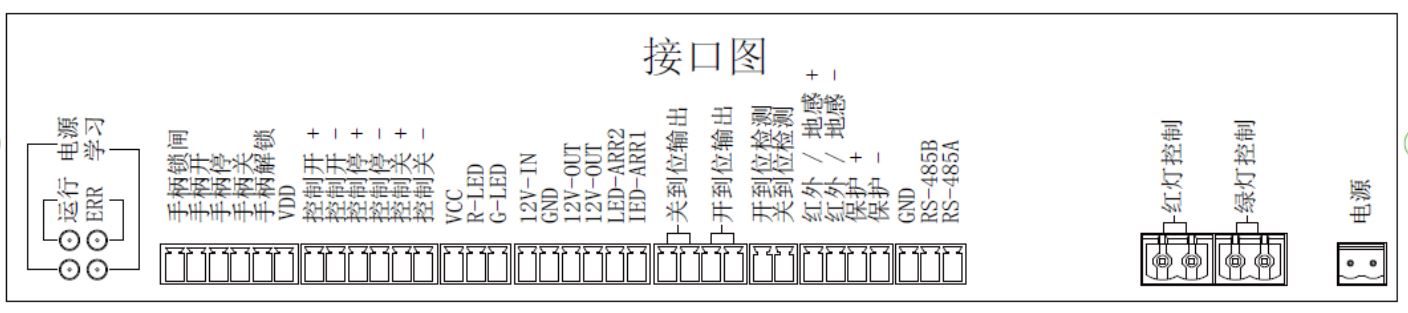
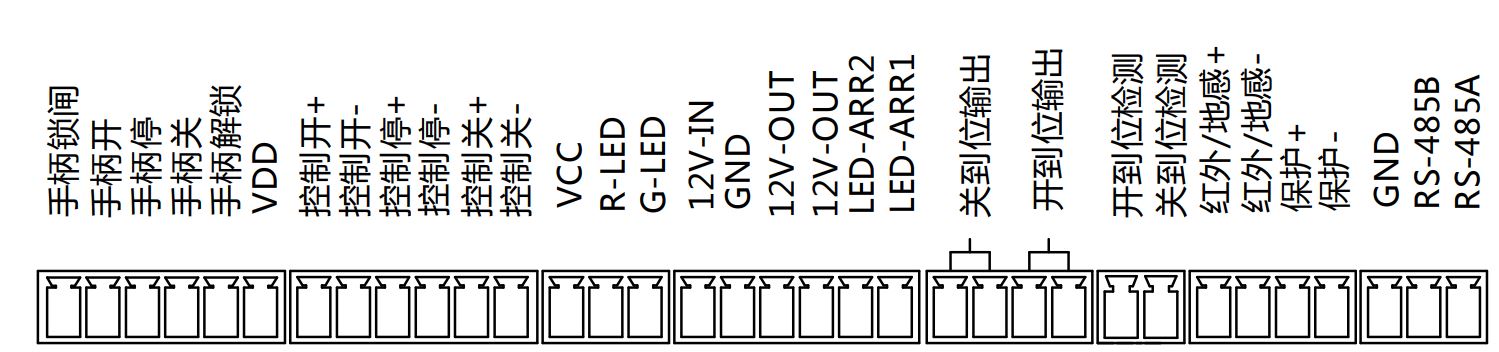
DS-TMC407设备接线端子如下图:
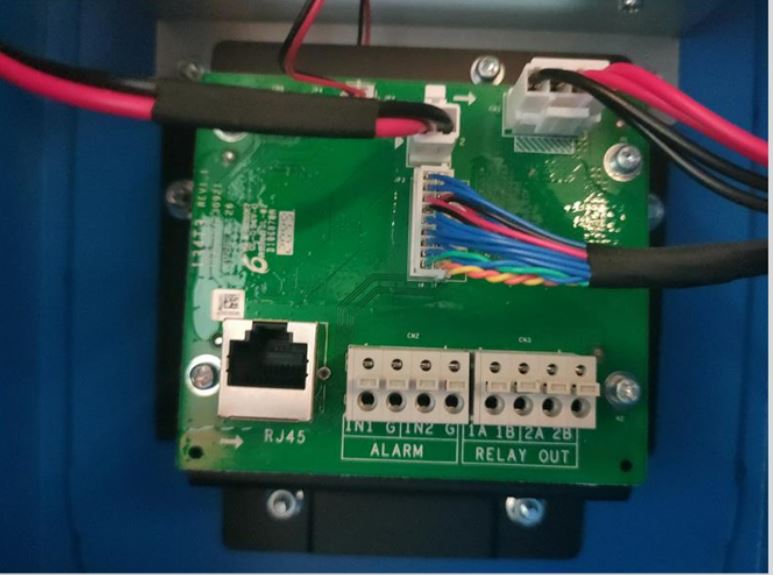
1、设备有专门的接线板,所有接线均在接线板上完成
2、IO触发接ALARM口的IN1、G,雷达混行时触发雷达接ALARM口的IN1、G和逻辑雷达接IN2、G
3、对应的1A1B2A2B对应接道闸的开、关
4、另外设备网络接口可从接线板预留网口接入,内部线路已和抓拍机连接,不许额外接线
5、如果需要接收遥控器开闸信号,需要将道闸开关到位输出线接到相机的ALARM口每个IN口可选配置:io发、开到位、关到位、遥控器开闸;所有出货的守蔚控制盒都支持输出遥控器开闸信号,开到位输出端子默认输出遥控器开闸信号。
注意:雷达混行模式下不支持遥控器信号
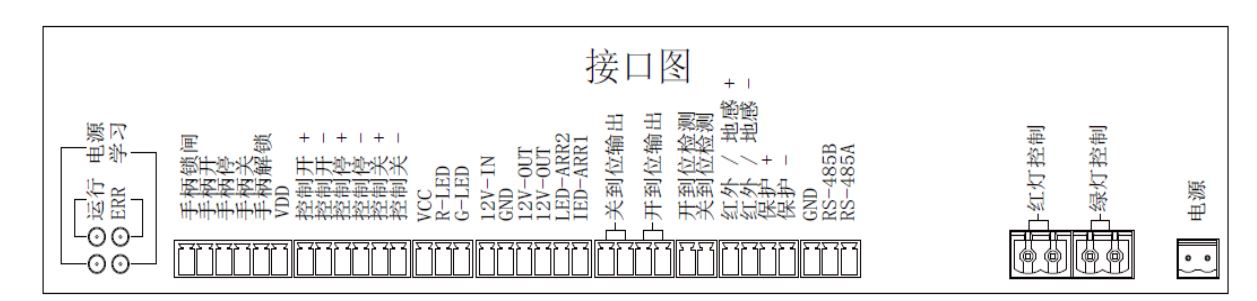
DS-TMG80X设备接线端子如下图:
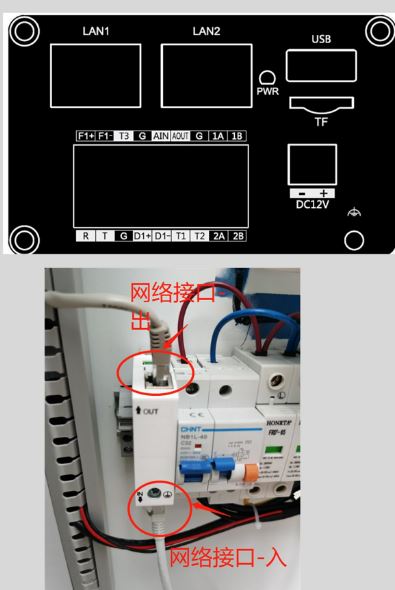
1、设备备有双网口,LAN2连接LCD屏,LAN1作为调试网口和设备连接口
2、F1+、F1-接补光灯,自身所带补光灯有两个接口,一路接220电压,另一辅助接口接信号
3、IO触发接T1、G,雷达混行接T1、G和T2、G
4、对应的1A1B2A2B对应接道闸的开、关
5、AOUT、G接功放板
6、D1+、D1-、G对应接LED屏 (485方式连)
7、另外设备网络接口可从上图所示接入,出口再对应接抓拍机
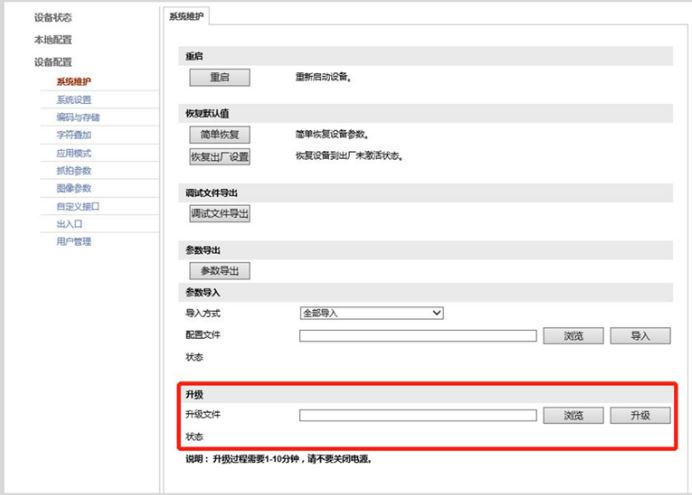
三、抓拍机升级
升级成功后提示重启,先选择不重启简单恢复后再进行重启,再重新进行相关配置
四、应用模式选择
1、触发类型
lO线圈:由外接开关量信号触发相机抓拍,线圈或者雷达
视频触发:通过纯视频触发相机抓拍
雷达混行:雷达混行场景选择该触发方式
2、IO触发状态
默认选择下降沿
3、关联I0号
根据触发信号接入选择,T1对应I01,以此类推雷达混行配置及接线
雷达混行正向雷达选择IO1,对应触发雷达接T1和GND,背向雷达选择1O2,对应逻辑雷达接T2和GND

五、抓拍参数
1、牌识参数
默认省份:据实填写
车牌方向:一般选择正背向车牌,视频触发混行需过滤尾牌时选择正向车牌
 2、补光灯参数
2、补光灯参数
自动检测亮度启用补光灯:亮度闯值越低补光灯越容易亮,闯值为0时补光灯常亮
按时间启用补光灯:按照实际需要启用,建议按时间启用

3、车辆特征参数
如果想要识别车型,需要在此处开启任意特征参数即可,车标子品牌等信息勾选后,也可以识别,可在字符看加处叠加相关信息,即可在抓拍原图上看到

六、图像参数设置
1、视频图像参数
快门:夜间如果图像过爆,可适当拉低快门
增益:夜间如果图像过爆,可适当降低增益

2、通用参数
宽动态:夜间如果车灯过亮导致图像过爆,可按照时间开启宽动态抑制车灯
注: 宽动态开启会导致图像噪点增大,不必要时候不需要开启
镜头类型:如果图像在强光下发白,镜头类型选择手动
启用车牌亮度补偿:解决顺逆光问题:顺光时抑制过爆,逆光时过暗增强

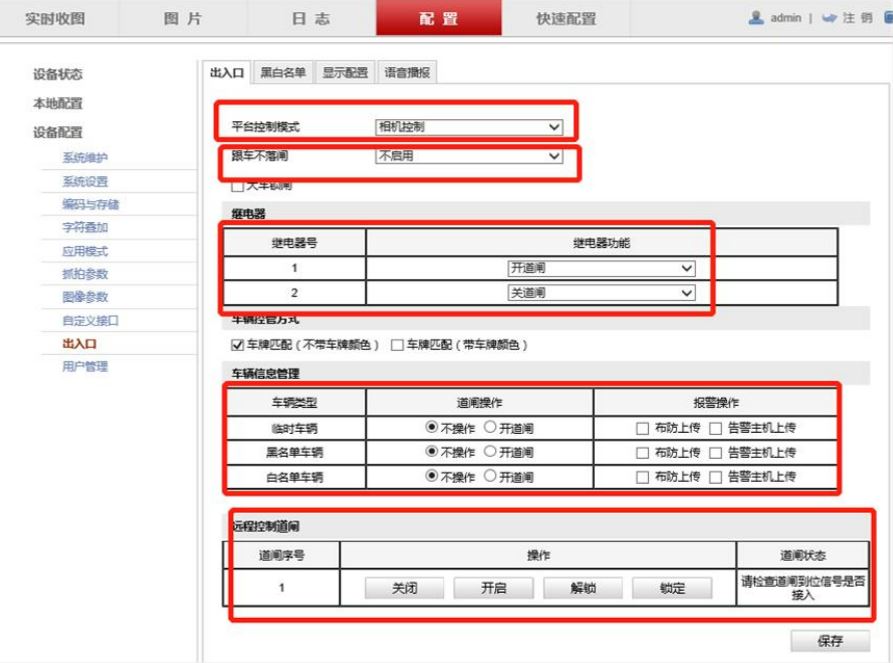
七、出入口设置
平台控制模式:平台控制对应开闸信号由平台发送,相机控制由相机根据车辆信息管理自己判断开闸
跟车不落闸:防跟车功能开关,1O视频检测模式均有效
继电器:对应继电器的功能类型
继电器1对应1A-1B;继电器2对应2A-2B
车辆信息管理:车辆放行规则设置,在相机控制模式下有效
远程控制道闻:可通过此处检测相机到道闸之间的线路连接是否正常
控制模式:如对接PMS或平台,必须选择平台模式
显示过车信息:如勾选则显示余位信息,如不勾选则可自定义显示固定内容并调整字体大小
显示时长0:可配置LCD显示时间
流媒体导入:可导入配置LCD显示图片和视频
流媒体导入要求: 图片的话JPG和PNG格式都可以,视频的话需要MP4格式且大小小于400M,屏的比例为16:9,别的比例的也能自适应自动铺满
启用组合播报:开启组合播报后,优先播报相机所配置的自定义内容
播报内容:可自定义配置播报内容
分时段播报:开启分时段播报后,可自定义选择不同时段播报音量大小

八、角度调整
设备安装定位时,必须将设备朝着车道方向,调整相机角度,使车牌在图像中与图像下边沿保持水平。相机角度调整方式如下图,通过调整相对应的螺丝

九、像素调整
识别位置及像素点
抓拍机的触发识别范围为3.5-5米,最佳位置为4米 (触发抓拍到相机间的距离) : 抓拍机抓拍位置在整体图像的下1/3处效果最佳。
调整的像素点应为140-160之间,车牌的横向像素,可直接在实时预览界面抓拍后直接测量像素,亦可在画图软件中打开抓拍车牌原图测量
像素点调整以及画面清晰程度
如识别触发位置已在最佳状态,像素仍是不满足的情况下,可通过调焦聚焦来调整像素点以及画面的清晰程度,具体调整位置如图所示

十、车牌识别区域
注:
识别区域一定要根据现场实际场景绘制,禁止用默认区域或者随意乱画。
1、抓拍时,车牌与车头本身必须在识别区域内部
2、识别区域包含抓拍前的轨迹区域;无关区域不要过分绘制,会影响识别速度
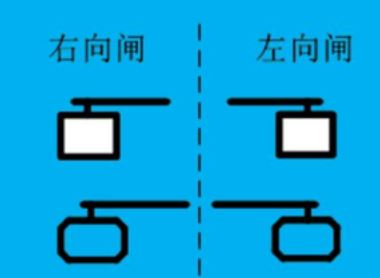
右进界
3、车道线1与车道右边界线构成的四边形为检测区域0
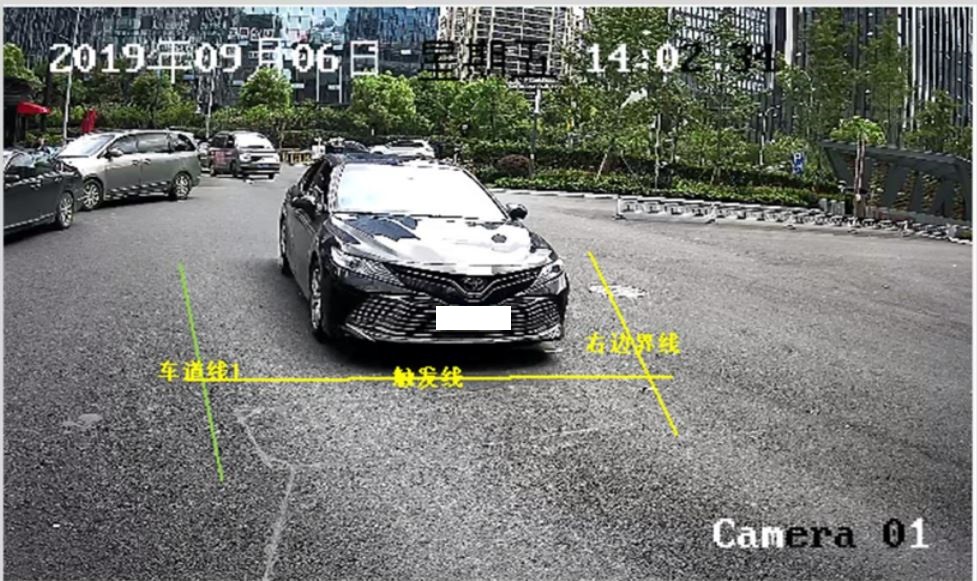
4、触发线
(1)线圈模式下: 触发线配置为实际触发位置,且在车道线围成的四边形内部
(2) 视频触发: 在车道线沟通的四边形下二分之一处,且保证在四边形内
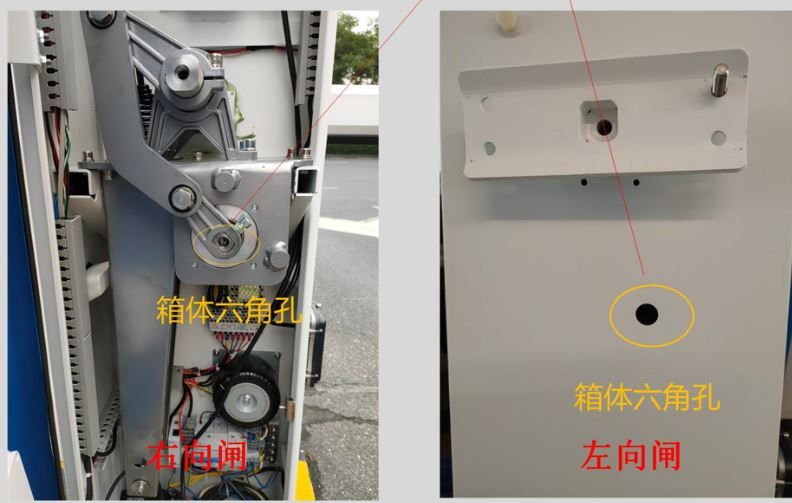
十一、手自动切换
注: 道闸上电时无法切到手动挡,需断电切换手动指
1、将L型扳手插入箱体六角孔
2、杆子开到位时,顺时针转动L型扳手为手动档
3、杆子关到位时,逆时针转动L型扳手为手动档
4、转动L型扳手使杆子在非到位状态即为手动挡;
5、杆子在开到位和关到位时即为自动挡
十二、平衡调整
注:道闸平衡调试前,要求先断电
步骤1: 旋转L型扳手,切换到手动模式,按压杆子至中间位置松手确认当前平衡位置
步骤2:松弹簧尾部固定螺母A和螺母B,上下调节弹长度(固定螺母C为限位螺母,弹簧调紧的最大位置),杆件拉至与地面成约20度左右夹角后松手,杆子能够自动被拉起来至60+5度,拧紧弹箭螺纹固定螺母A和螺母B
步骤3:平衡调试完成,上电自动检测开到位




 一、设置安装
一、设置安装